Н.Е. Зубов, А.В. Лапин, Е.А. Микрин
10
Далее будем рассматривать только тот канал управления (обо-
значим его
θ
), которому соответствует наибольшее по модулю
начальное значение угла
(
)
0
0
0
0
max ,
,
θ = γ ψ ϑ
.
Поставим задачу для любых начальных значений угла
θ
0
∈
(0°; 180°] и угловой скорости
[
]
0
15 / с; 15 / с
θ ∈ − ° + °
определить
такие значения параметров управления
p
=
p
opt
и
q
=
q
opt
, чтобы обес-
печить минимальную возможную длительность переходного процес-
са (ПП)
T
ПП
=
T
ПП
opt
при условии
max
lim
θ ≤ θ + δ
, где
ПП
max
max ( )
t T
t
≤
θ = θ
.
Предельная угловая скорость
lim
θ
определяется порогом чувстви-
тельности бортовых измерительных приборов, а также возможностя-
ми человеческого организма. При этом допустимое превышение ско-
рости
lim
θ
может быть не более
δ
= 2…3 °/с. Примем
lim
20 /с
θ = °
, а
критерием окончания ПП будем считать одновременное выполнение
неравенств
( ) 0, 057
t
θ ≤ °
и
( ) 0, 057 / с
t
θ ≤
°
для любого
t
≥
T
ПП
.
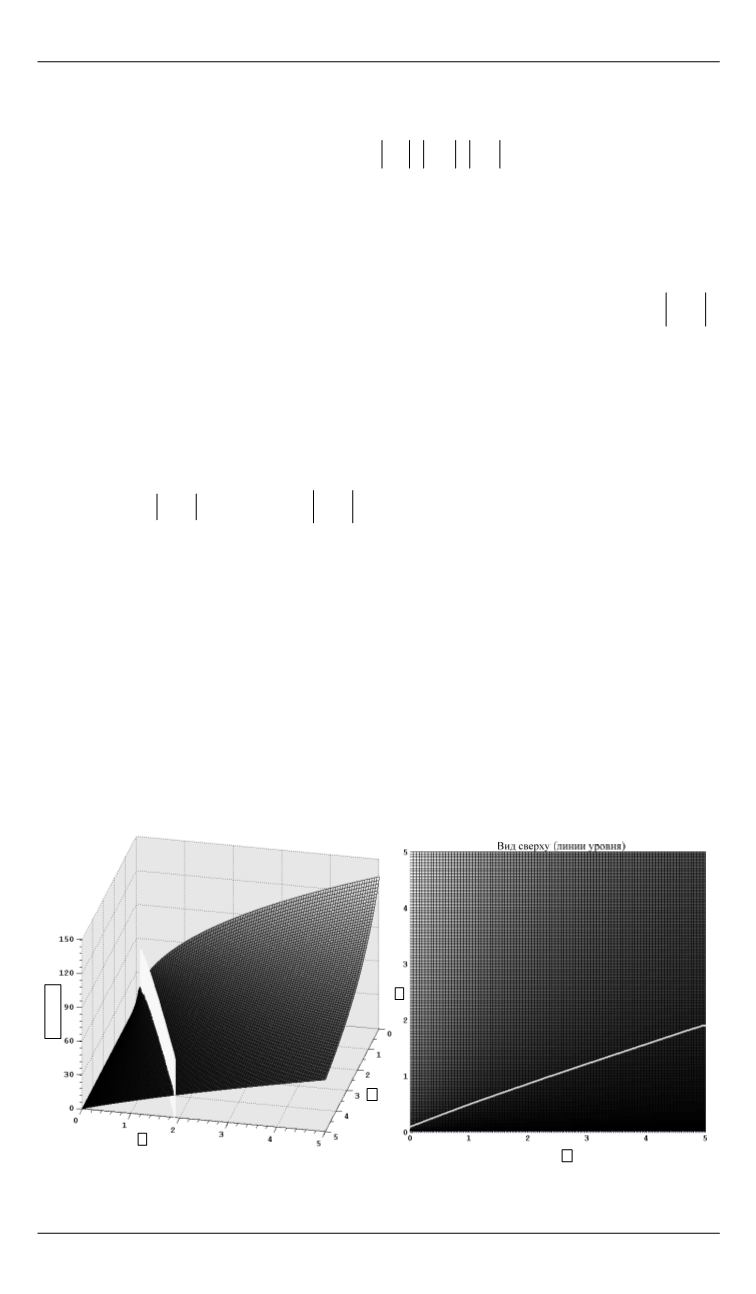
Математическое моделирование процесса (4.6) в среде програм-
мирования Delphi показало, что область допустимых значений (ОДЗ)
параметров
p
и
q
, при которых выполняется условие
max
lim
θ ≤ θ
,
ограничена тремя линиями:
p
≡ 0,
q
≡ 0 и
q
=
q
lim
(
p
). При этом функ-
ция
q
lim
(
p
) на всем диапазоне изменения аргумента
p
≥ 0 определяется
однозначно и близка к линейной функции. На рис. 2 показано, как
строится ОДЗ параметров
p
и
q
на примере начальных условий
θ
0
= 60° и
0
0
θ =
(при построении использовался графический редак-
тор среды MATLAB).
p
q
p
q
град/с ,
max
θ
Рис. 2.
ОДЗ параметров управления при
θ
0
= 60° и
0
0
θ =


