Обзор моделей нестационарного качения колеса с упругой шиной…
5
такте со следом, оставляемым нитью на опорной поверхности. Это
означает, что каждая точка нити в площадке контакта определяет по-
ложение следующей за ней точки в следующий момент времени:
( , ) ( , ) ( )
( ),
q x s h x s y x s x
=
− − α
(3)
где
( )
x
α
— угол между плоскостью вращения обода колеса и
направлением невозмущенного движения.
Подставляя в выражение (3) нестационарного режима необходимые
геометрические соотношения, получаем кинематическое дифференци-
альное уравнение, решаемое, как правило, численными методами:
1
1
1
tg arctg
cos( )
sin( )
cos( )
q
x q
q
y l
⎛
⎞
⎛ ⎞ − + α =
α − α α + + α α
⎜ ⎟
⎜
⎟
σ ⎝ ⎠
⎝
⎠
&
&
& &
&
,
где
1
q
— отклонение нити от срединной плоскости вращения обода в
точке входа в контакт.
Модель типа нити на упругом основании не позволяет учесть ни
продольное, ни поперечное скольжение, т.
е. применять модель целе-
сообразно лишь в пределах угла увода ±4°...10°. Кроме того, в модели
в данном представлении не предусмотрен учет продольных силовых
факторов (тяговых или тормозных), а также бокового наклона плос-
кости вращения колеса. В этой связи применение модели для задач
автомобилестроения весьма ограничено.
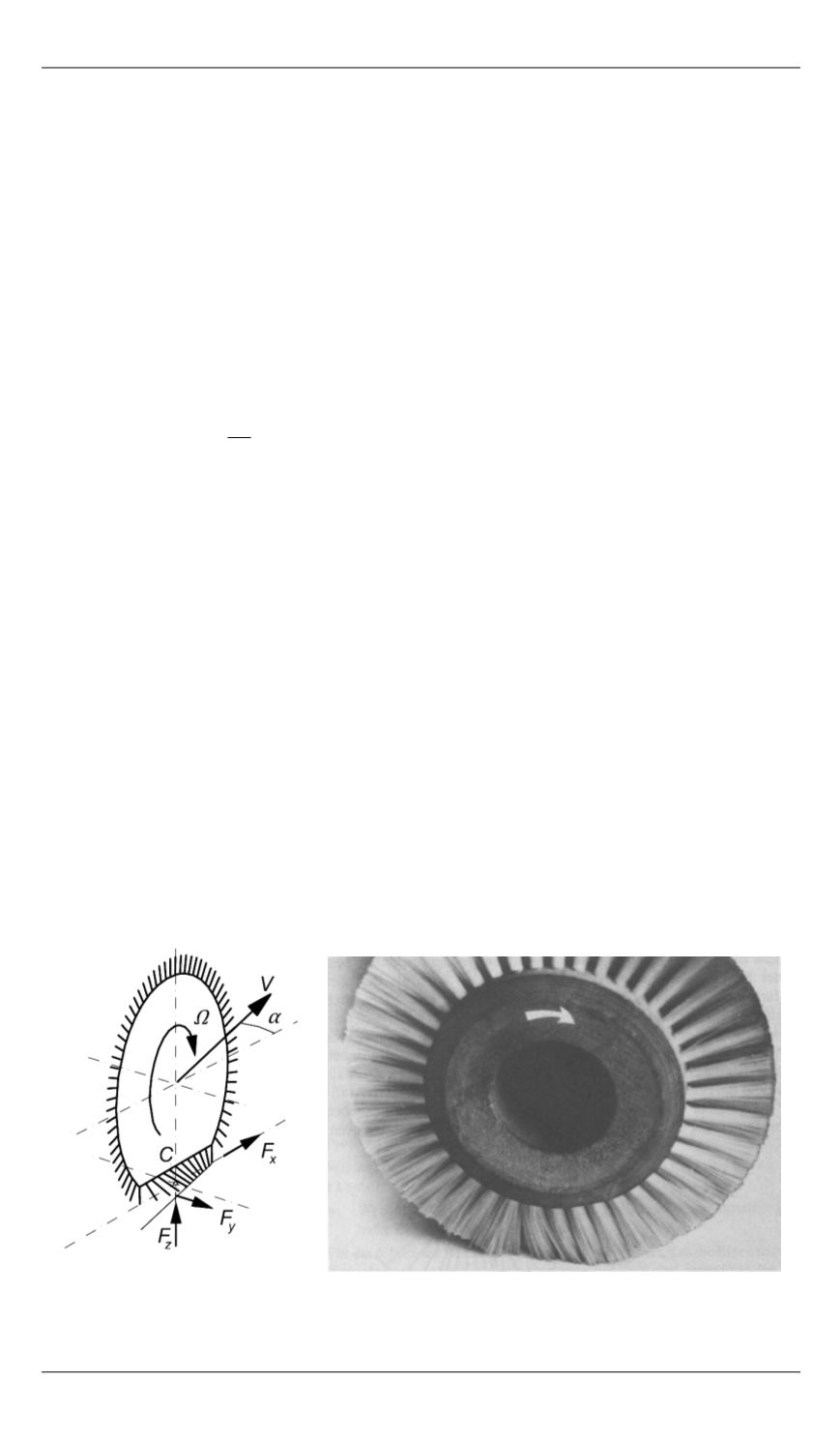
Принципиально другой механический аналог основан на щеточ-
ной модели [2], где шина представлена бесконечным множеством
щетинок, периферийно расположенных по окружности жесткого
обода и упруго отклоняемых от нормального состояния независимо
одна от другой (рис. 5).
а
б
Рис. 5.
Схема (
а
) и макет (
б
) щеточной модели


