Ю.С. Белинская
4
4
0
0
28 c,
0, 2,
0,3.
t
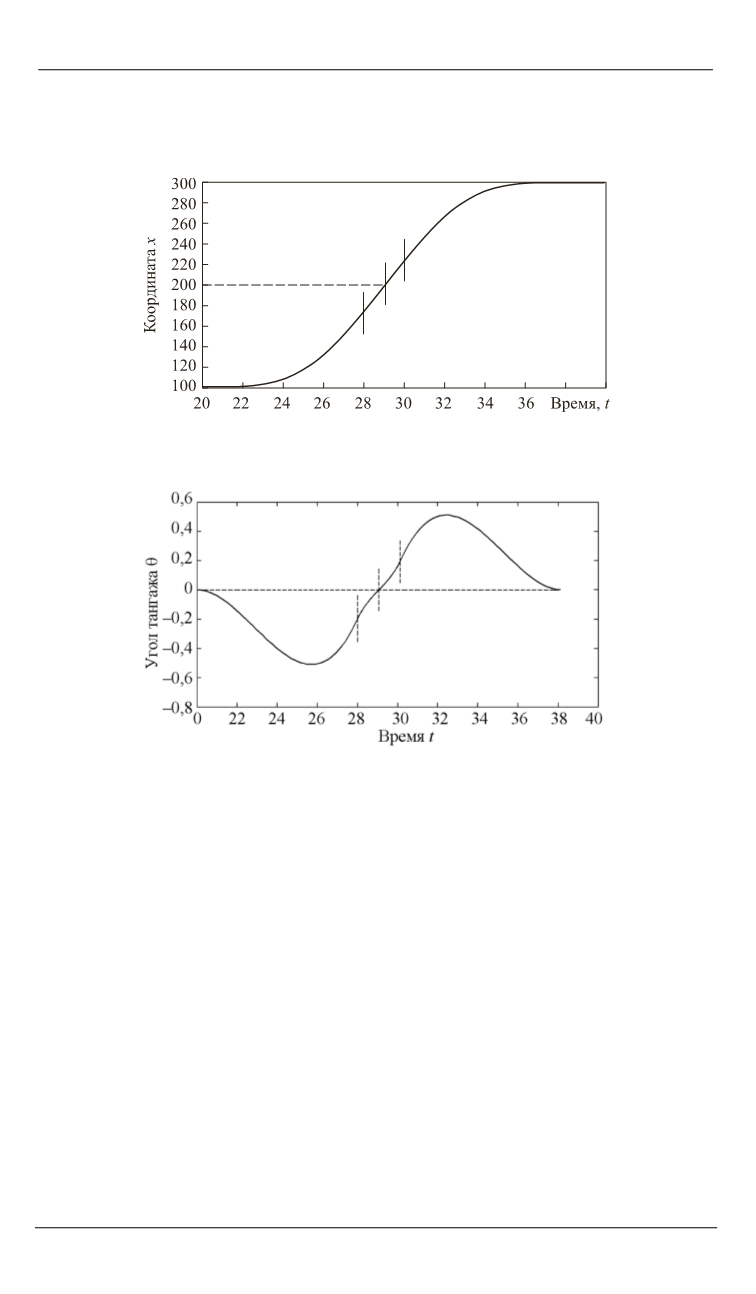
Приведем графики переменных состояния от времени (рис. 1, 2).
Рис. 1.
Зависимость координаты
x
от времени
Рис. 2.
Зависимость угла тангажа
от времени
На рисунках видно, что графики симметричны относительно цен-
тральной точки, соответствующей
3
.
t t
При постановке задачи указывалось, что время окончания движе-
ния
2
t
не задается изначально. Второй этап заканчивается в тот мо-
мент, когда переменная θ достигнет значения, равного нулю. Един-
ственный способ изменить время окончания движения — варьирова-
ние параметров
4
t
,
0
,
0
.
Проведем серию тестов при различных значениях параметров и
выясним, как изменяется конечное время движения при различных
значениях параметров.
Параметр
4
t
зафиксируем, а
0
и
0
будем изменять в промежут-
ке от 0,1 до 0,35 и от –0,1 до –0,4 соответственно с шагом 0,05 (таб-
лица).
Знаком «—» обозначена ситуация, когда полученное решение
начинает расходиться. Это связано с ошибками численного интегри-
рования на втором этапе. По данным таблицы видно, что при увели-


