Л.В. Северова, C.П. Северов
6
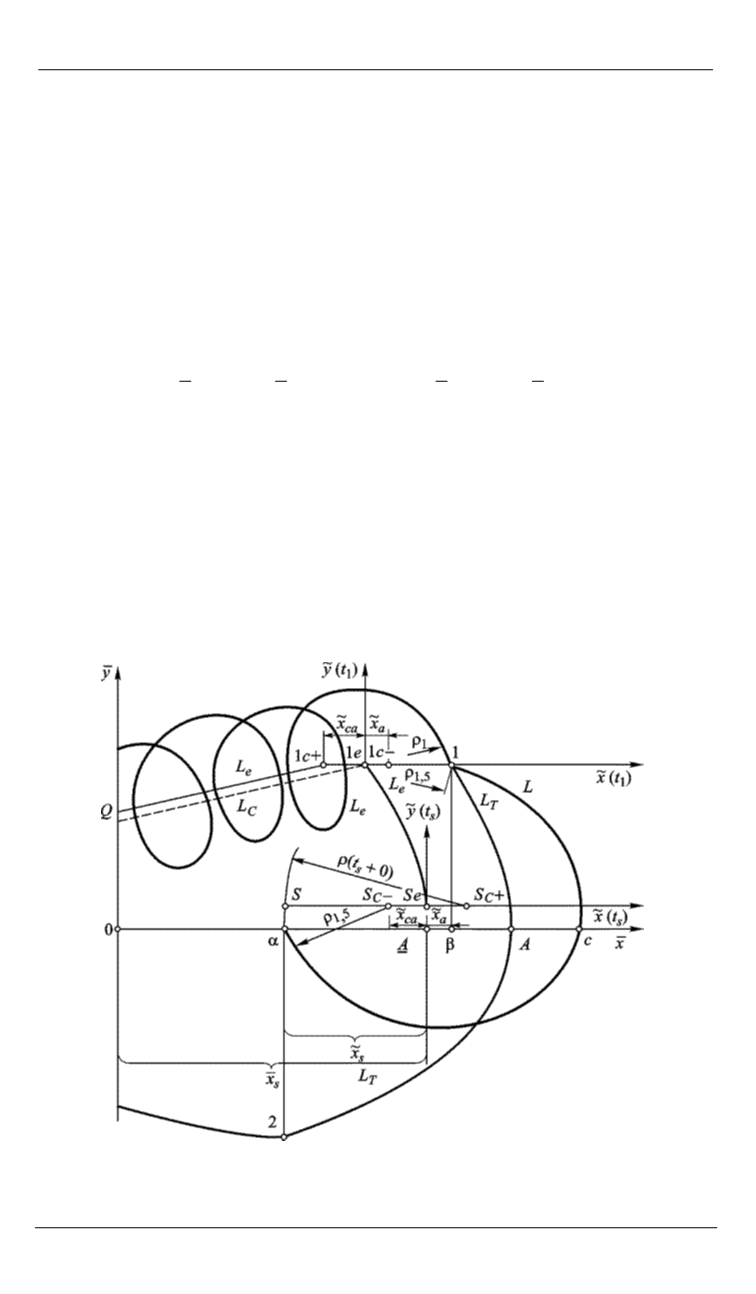
Рассмотрим сначала условие захвата регулятора упругими коле-
баниями КА при
0
n
. Предполагаемый вид фазовой траектории
( 1 2)
r
L Q A
аппарата как твердого тела представлен на рис. 2.
Изображающая точка деформируемого КА из положения
Q'
при-
ближается к линии переключения по некоторой кривой. В момент
t
1
она перейдет линию
. Естественно предположить для определения
нижней границы устойчивости с учетом неполноты информации о
колебаниях ВЭ, что в этот момент имеют место наихудшие условия
по фазе из всех возможных. Тогда в соответствии с [3] начальные
условия можно записать так:
1
1
0
1
1
1
1
0
1
( 0)
, ( 0)
,
( 0)
, ( 0) 0.
cc
j
cc
j
x t
x
x
y t
y
x t
x x
y t
(12)
В соответствии с используемыми кусочно-нелинейными элемен-
тами фазовых траекторий начальные условия трансформируются в
конечные значения параметров системы на исследуемом интервале.
Данные значения принимаются в качестве начальных условий после-
дующего интервала и т. д.
Условия имеют место, когда
Рис. 2


