














 2 / 14
2 / 14

С.И. Гавриленков, С.С. Гаврюшин, В.А. Годзиковский
2
Инженерный журнал: наука и инновации
# 1·2017
рительный датчик — это преобразователь нагрузки, который измеря-
ет массу путем преобразования величины (массы) в другую измерен-
ную величину (выходной сигнал), с учетом значения ускорения силы
тяжести и аэростатической силы в месте его применения. Рассмот-
рим, как работает цепь преобразования физических величин в случае
тензодатчика.
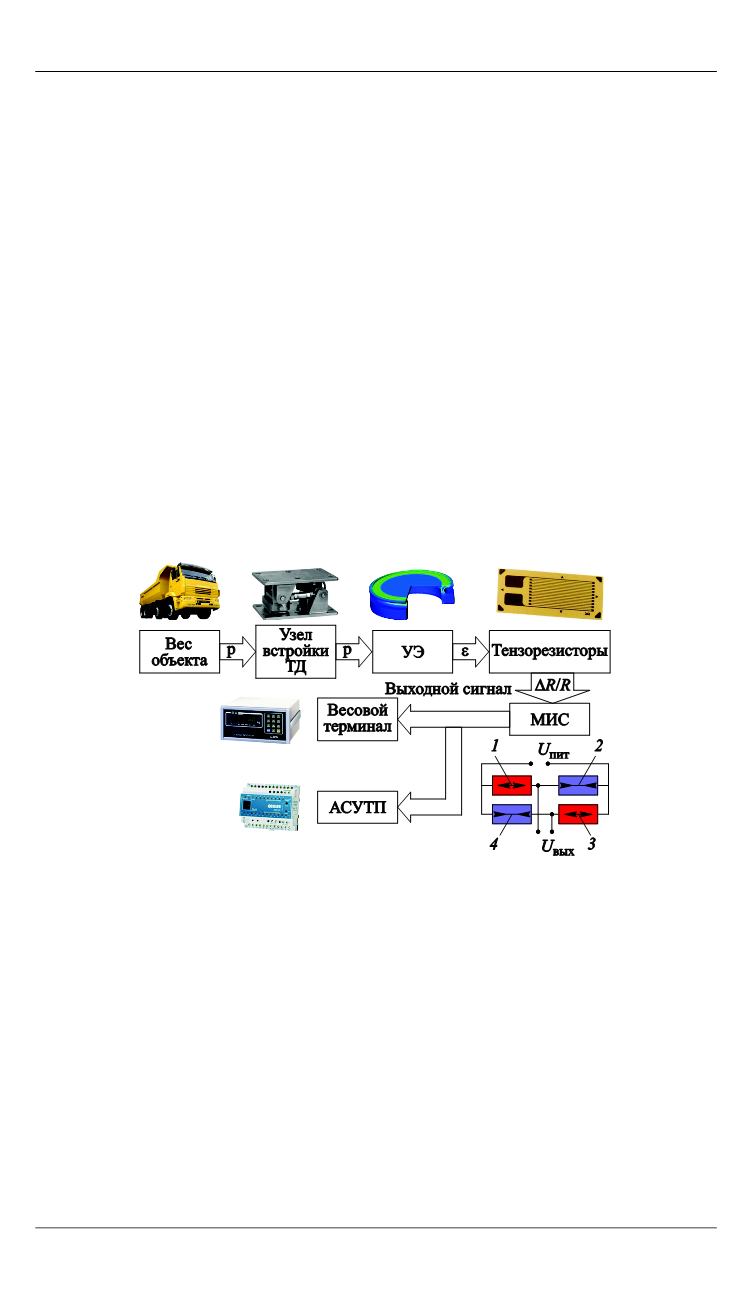
Измеряемая сила — вес — через силопередающее устройство или
узел встройки ТД действует на тензодатчик и деформирует его. На
поверхностях датчика наклеены чувствительные элементы — тензо-
резисторы, которые под воздействием деформации изменяют свое
сопротивление. Деформация тензорезисторов зависит от места
наклейки на УЭ. Тензорезисторы соединены в мостовую измеритель-
ную схему (МИС) Уитстона, где изменение сопротивления тензоре-
зисторов в плечах МИС приводит к возникновению на выходе МИС
электрического сигнала, пропорционального приложенной нагрузке.
Сигнал оцифровывается и обрабатывается и далее в зависимости от
области применения либо выводится на весовой терминал, либо пе-
редается в АСУТП (рис. 1).
Рис. 1
. Цепь преобразования физических величин при
измерении веса ТД (
1
и
3
— номера плеч МИС, работа-
ющих на растяжение,
2
,
4
— на сжатие)
В работе рассмотрена полная МИС, элементы всех плеч которой
чувствительны к прикладываемой нагрузке. Также существуют изме-
рительные полумосты и четвертьмосты [3].
Примем следующие допущения.
1.
Все тензорезисторы растяжения наклеены на УЭ так, что их
деформация одинакова и равна .
+
ε
Аналогичное допущение для тен-
зорезисторов сжатия — их деформация равна .
−
ε
2.
В одном плече может быть от одного до четырех тензорези-
сторов, но они наклеены так, что их деформация одинакова.