














 8 / 14
8 / 14

С.И. Гавриленков, С.С. Гаврюшин, В.А. Годзиковский
8
Инженерный журнал: наука и инновации
# 1·2017
6)
данные о геометрических размерах тензорезисторов МИС и их
коэффициентах тензочувствительности.
Число критериев не зафиксировано, можно добавлять дополни-
тельные критерии, вычисляемые внутри расчетной модели. На выхо-
де программы ЛПР получает информацию в виде множества допу-
стимых и Парето-оптимальных вариантов. Программа позволяет для
каждого из этих вариантов автоматически открыть систему ANSYS
и повторно провести расчет выбранного варианта для детального ис-
следования.
Использование программы при проектировании ТД
. Возмож-
ности программы демонстрируются на примере поиска оптимальной
конфигурации ТД, предназначенного для использования в системе
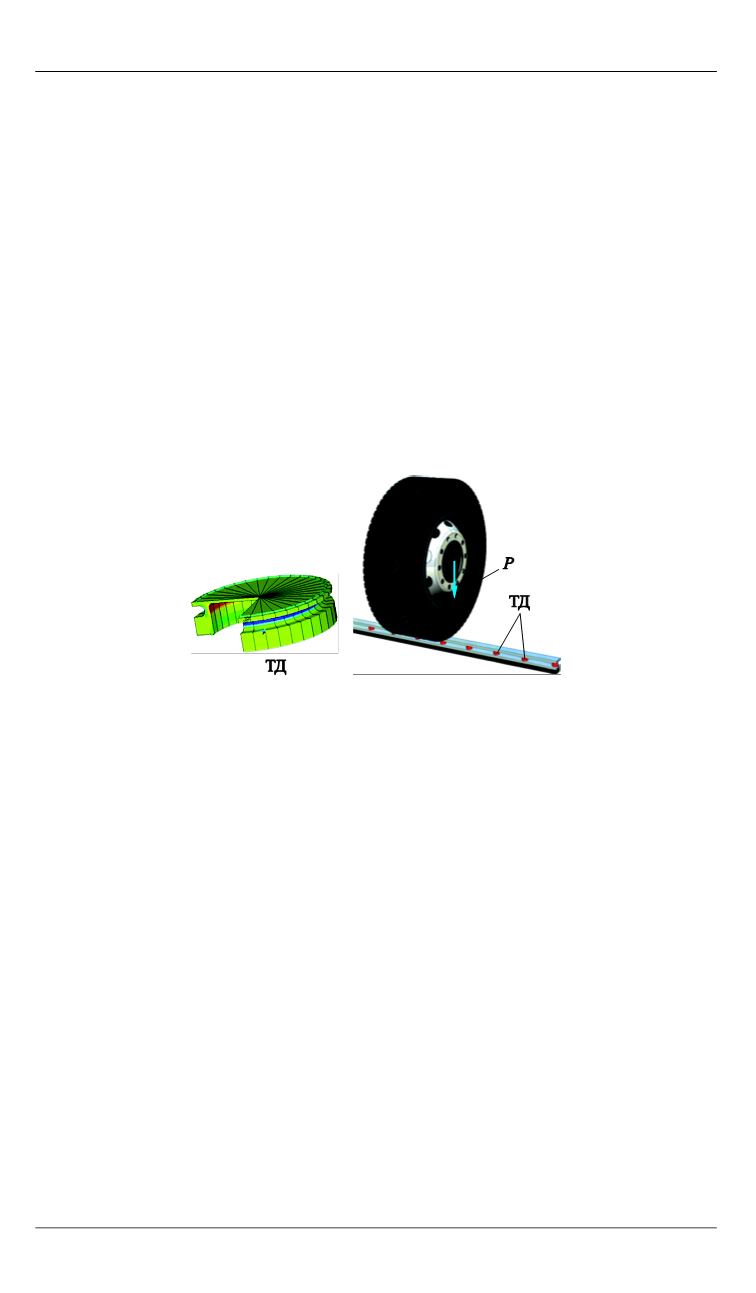
взвешивания в движении (СВВД) (рис. 5). Материал датчика — сталь
09Х16Н4Б (модуль Юнга 200 ГПа, коэффициент Пуассона 0,3).
Рис. 5.
Вид СВВД и ТД (СВВД конструктивно
представляет собой две стальные пластины,
между которыми находится ряд ТД)
Требования, предъявляемые к ТД СВВД
Номинальная нагрузка, Н ........................................................................... 50 000
Напряжение, МПа, не более .................................................................. 500
Номинальный РКП, мВ/В, не менее .....................................................
1
Нелинейность, %, не более .................................................................... 0,5
Перемещения на опорах, мкм, не более ...............................................
2
Внешний диаметр, мм ............................................................................ 100
Высота датчика, мм ................................................................................
26
Параметрическая модель УЭ приведена на рис. 6. Тензорезистор
растяжения приклеен вертикально на внутренней вертикальной ци-
линдрической поверхности УЭ, тензорезистор сжатия — на этой же
поверхности, но в окружном направлении.
Управляющие параметры и их границы изменения приведены
в табл. 2.