А.Е. Юдин
2
текущего состояния манипулятора, вычисляет заданные угловые ско-
рости для каждого привода. Также на этом уровне осуществляется
контроль усилий по показаниям силомоментного датчика, установ-
ленного на схвате. Эти алгоритмы физически реализованы в виде
программы, выполняющейся на промышленном компьютере архи-
тектуры Intel x86 под управлением операционной системы реального
времени (ОСРВ).
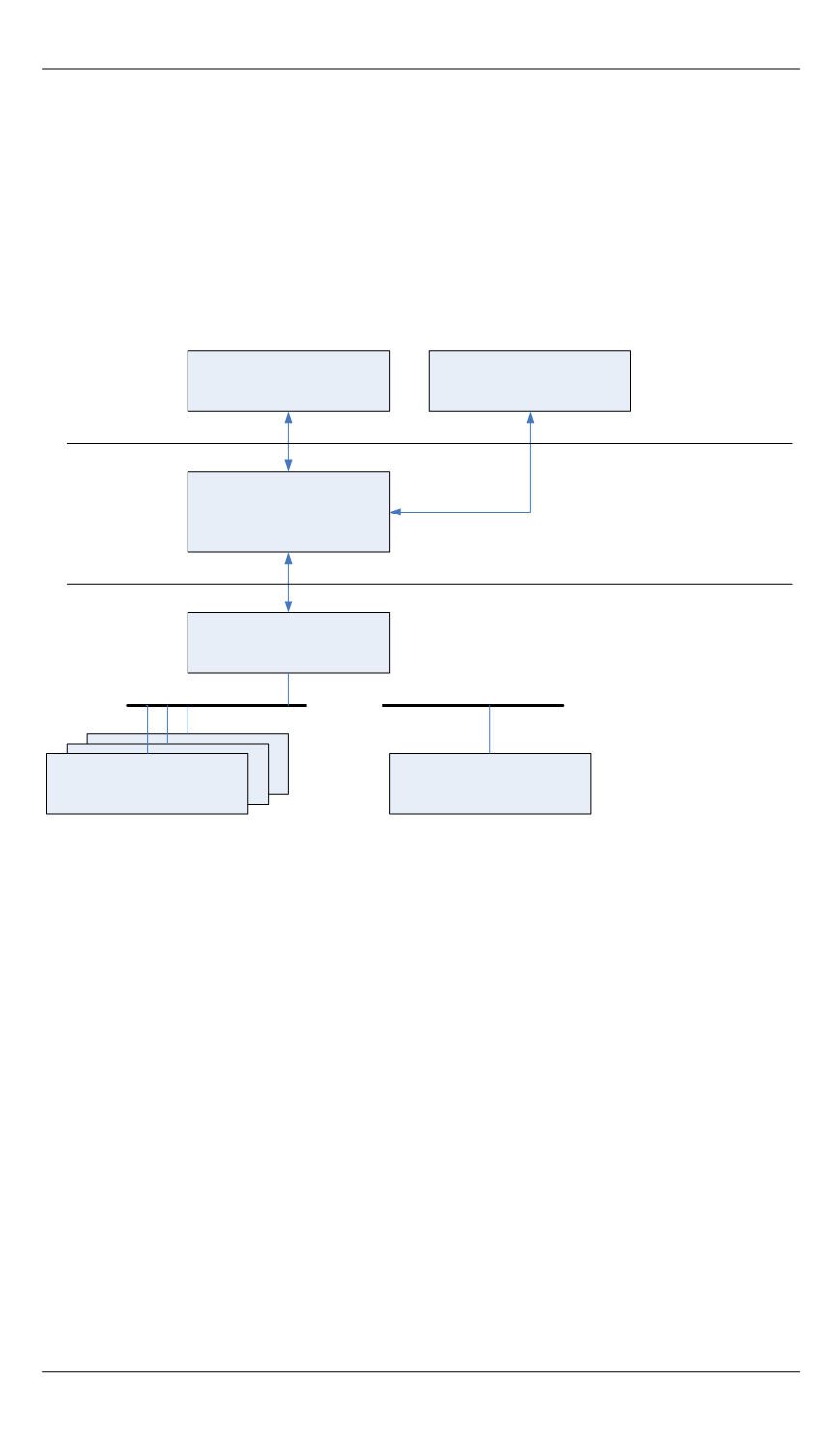
Пост управления
Кинематический
процессор
Преобразователь
интерфейсов
Ethernet
Ethernet
Блок органов
управления
RS232
Модуль управления
приводом
FlexRay, CAN
Датчик усилий
3 уровень
2 уровень
1 уровень
Рис. 1.
Структура системы управления манипулятором
Третий уровень — управление режимами работы системы, инди-
кация для оператора. Физически реализован в виде программы, вы-
полняющейся на промышленном компьютере архитектуры Intel x86
под управлением операционной системы Microsoft Windows 7; взаи-
модействие с оператором осуществляется через сенсорный дисплей и
блок органов управления (подключен напрямую к вычислителю вто-
рого уровня управления).
Организация процесса разработки программного обеспечения.
Для реализации системы управления необходимо было разработать
способ, позволяющий проводить параллельно работы над всеми тре-
мя уровнями управления. Для разработки модуля управления не тре-
буется наличие верхних уровней управления; для отладки алгоритма
управления приводом достаточно одного экземпляра модуля с под-
ключенным двигателем и набором датчиков.
3-й уровень
2-й уровень
1-й уровень


