А.Е. Юдин
6
ную сборку с алгоритмом управления и использовать произвольное
имя класса за счет механизма позднего связывания.
Программа моделирования содержит математическую модель
манипулятора, реализацию протокола взаимодействия с блоком ор-
ганов управления через интерфейс RS232, а также систему управле-
ния моделированием, которая позволяет в режиме мягкого реального
времени выполнять алгоритм управления и вычисление модели дви-
жения манипулятора с заданной частотой. Под мягким реальным
временем здесь понимается отсутствие требований к временной точ-
ности такта моделирования, но при этом средняя частота моделиро-
вания поддерживается на уровне 1000 Гц.
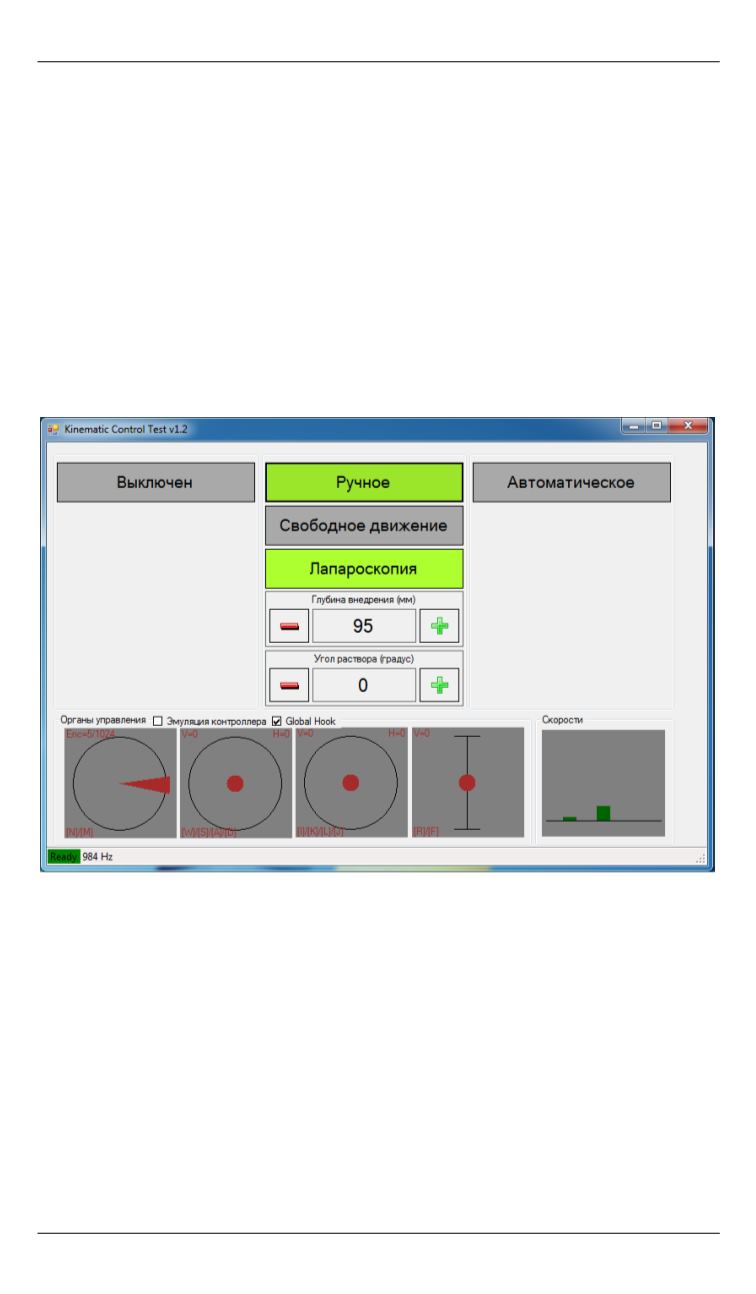
Внешний вид экрана программы представлен на рис. 4.
Рис. 4.
Внешний вид окна программы математического моделирования
алгоритма управления манипулятором
Также программа математического моделирования обеспечивает
протокол взаимодействия с системой визуализации и отправляет в
нее данные о положении степеней свободы манипулятора и другую
отладочную информацию.
Наряду с организацией моделирования, программа является про-
тотипом интерфейса с оператором и позволяет задавать режимы ра-
боты манипулятора. В окне программы отображается текущее поло-
жение органов управления, текущий режим работы манипулятора, а
также диаграмма скоростей всех семи приводов.


