
















 6 / 9
6 / 9

И.А. Ломака, Е.В. Устюгов
6
Инженерный журнал: наука и инновации
# 8·2016
34
0,5 3 4 ;
Т
S
T T
=
×
(11)
41
0,5 4 1 ,
Т
S
T T
=
×
(12)
площадь прямоугольника по формуле
1234
32 34
S
= ×
.
(13)
Таким образом исследуем все точки окружности на принадлеж-
ность кадру.
После умножения векторов
1
,
n
2
,
n
3
,
n
4
,
n
,
k
n
,
p
n
,
z
n
c
n
на
матрицу поворота и проверки всех точек сечения на принадлежность
кадру можно сделать вывод о видимости горизонта, а значит, и о
принципиальной возможности решить задачу навигации при данной
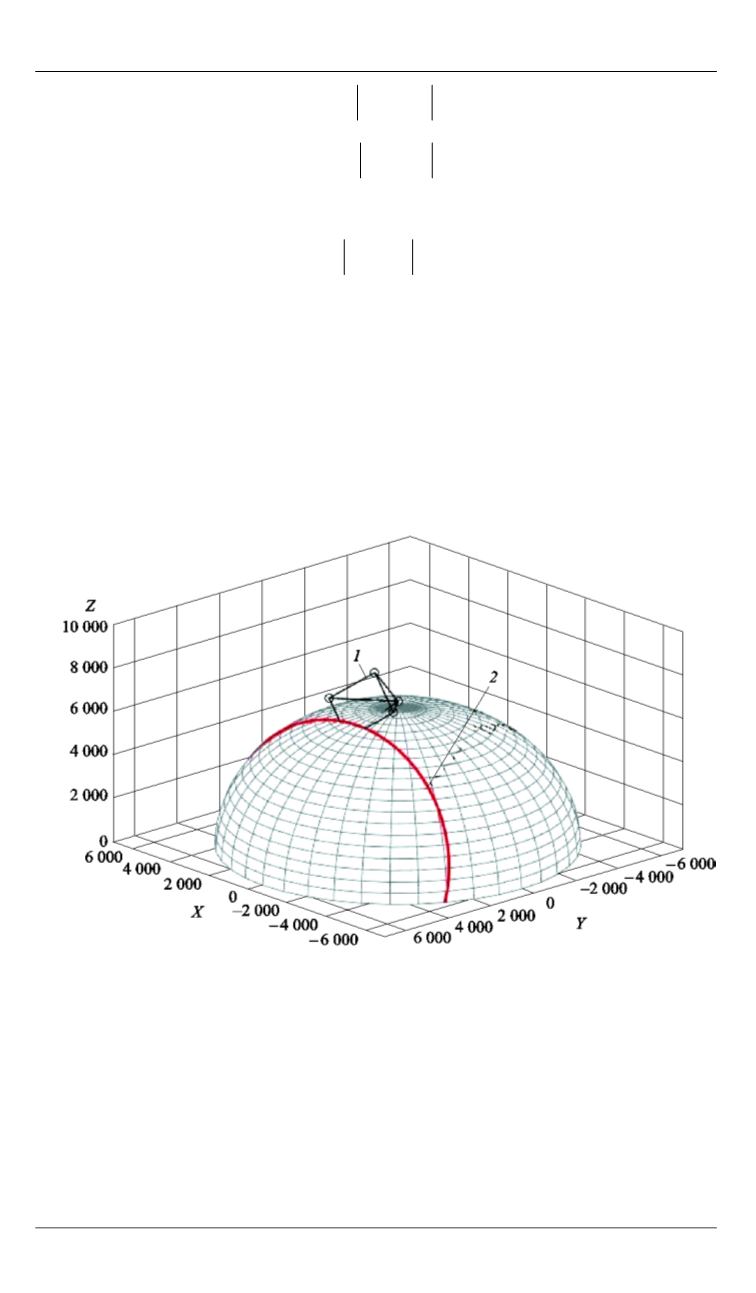
ориентации. Результаты моделирования приведены на рис. 5.
Рис. 5.
Результат моделирования
По модели численно была определена область применимости ви-
деокамеры с углом полураствора α 28
= °
, находящейся на высоте
300 км (рис. 6).
Две зоны максимума обусловлены тем, что горизонт Земли про-
ходит по диагонали кадра.