А.Б. Борзов, Н.С. Соболева
4
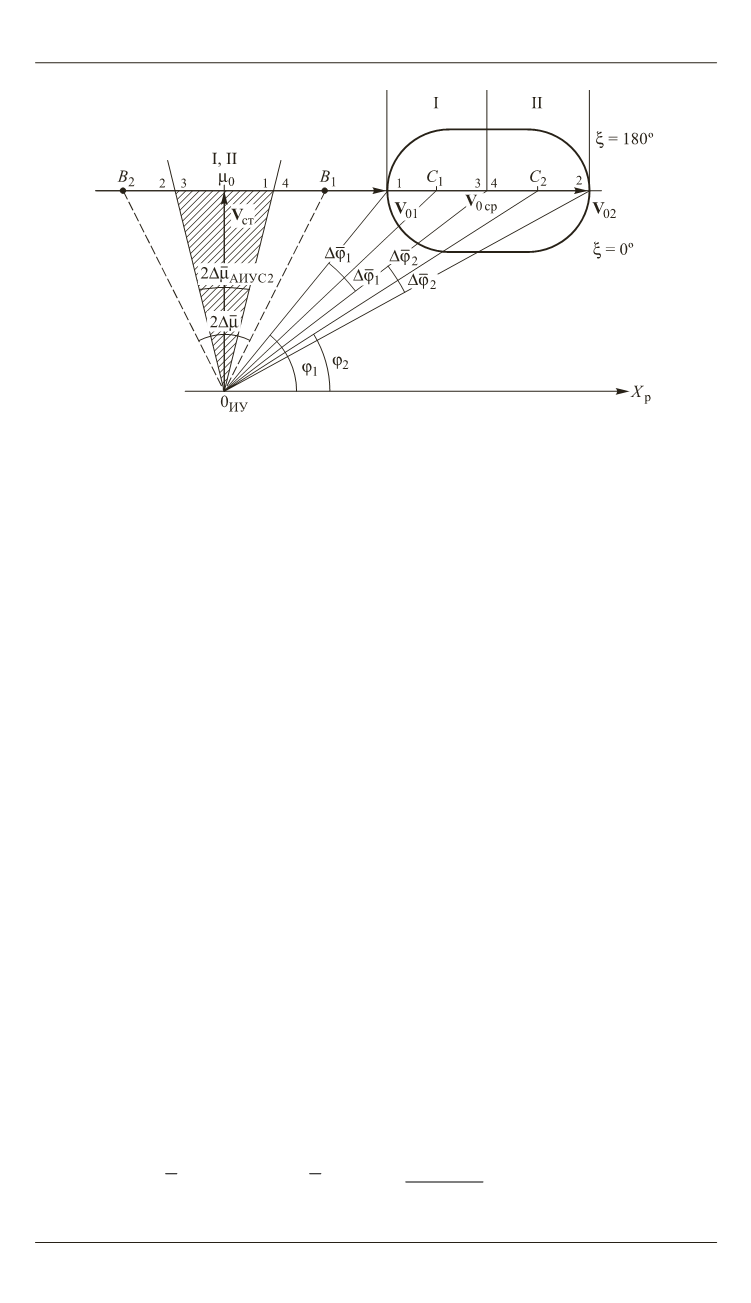
Рис. 2.
Ширина конуса для конструкции АИУС с двумя антенными системами
Для реализации данного метода необходимы информация о модуле
относительной скорости для конкретных условий встречи БП с целью,
устройство сравнения, определяющее диапазон, в который попадает
реальная относительная скорость, и устройство, обеспечивающее под-
ключение соответствующей антенной системы. Для реализации метода
минимально необходимой является информация о том, как выполняется
стрельба: курс встречный — большие
V
отн
, догонный — малые
V
отн
.
В этом случае подключение к передатчику необходимой антенной си-
стемы выполняется перед стартом БП.
Согласование за счет конструкции АИУС с четырьмя антен-
ными системами
.
Если в БП возможно использование конструкции
АИУС с четырьмя антенными системами, то диапазон относительных
скоростей
V
01
…
V
02
на годографе может быть поделен на четыре равных
диапазона: I, II, III, IV (рис. 3). Для каждого из них устанавливается
необходимый угол наклона диаграммы направленности — соответ-
ственно φ
1
, φ
2
, φ
3
, φ
4
, определяемый по средним относительным скоро-
стям диапазонов. Точки
C
1
,
C
2
,
C
3
и
C
4
— точки локации цели для
каждого из диапазонов.
Из рис. 3 видно, что сужение диапазонов скоростей каждой из ан-
тенных систем в 4 раза уменьшает систематические ошибки в 4 раза,
до значений 2Δφ‾ = 2Δφ‾
1
= 2Δφ‾
2
= 2Δφ‾
3
= 2Δφ‾
4
. Тогда конус разлета эле-
ментов 2Δμ‾ для метода согласования за счет широкого конуса разлета
элементов сужается до 2Δμ‾
АИУС4
. Для рассматриваемого варианта со-
гласования ширина конуса разлета элементов (см. рис. 3)
02 01
4
4
sin
4.
2
V V
n
nV
−
∆µ
≅ ∆µ
=
=
АИУС
АИУС
ст
при


