Е.М. Воронов, А.Л. Репкин, Чжан Сяньцзянь
4
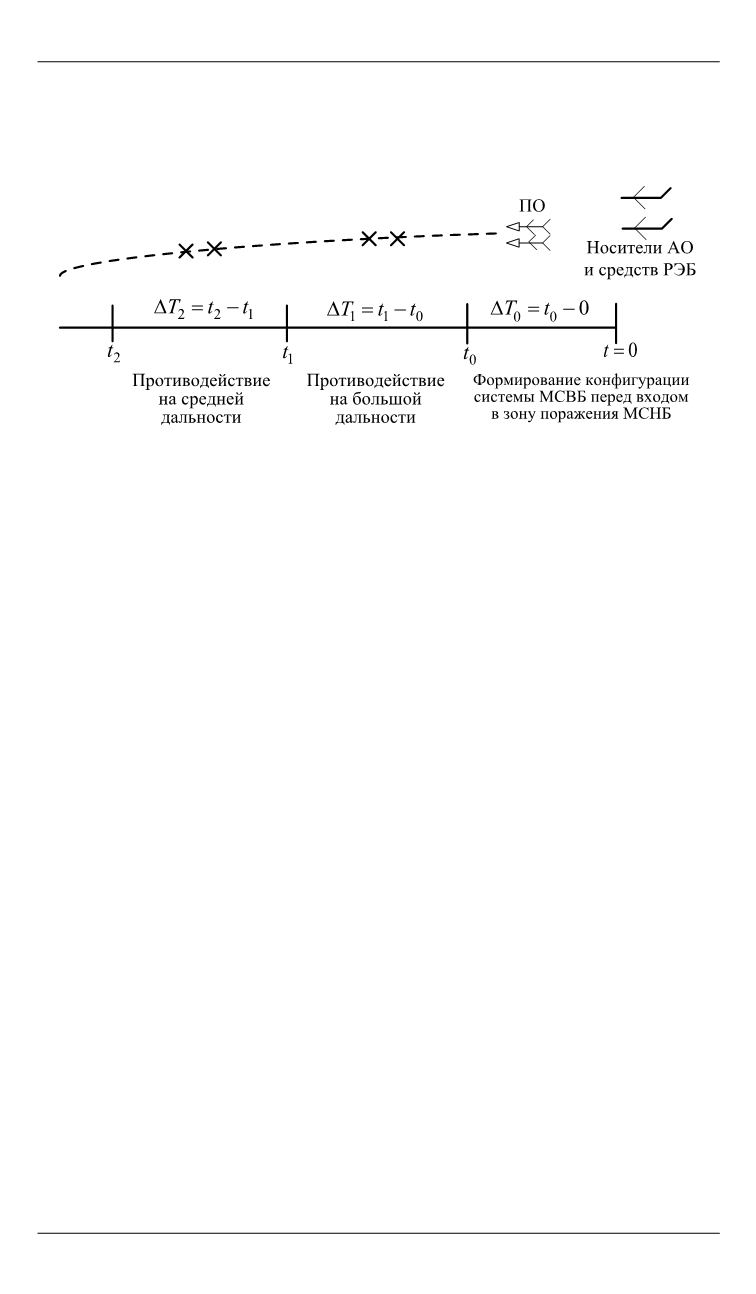
сти МСНБ;
t
1
— момент вхождения воздушных целей в зону ЦР ком-
плексов средней дальности МСНБ;
t
2
— момент встречи активных
объектов (АО) МСВБ с МСНБ.
Рис. 2.
Временная развертка многорубежной конфликтной ситуации
Разработанная схема конфликтного взаимодействия МСНБ и
МСВБ изображена на рис. 3, где
x
i
— количество объектов каждого
типа;
ν
ij
— доля
i
-х средств, выделенных на поражение объектов
j-
го
типа (управляющие параметры) с номинальной вероятностью пора-
жения
p
ij
Основная цель МСНБ — не пропустить пассивные объекты
(ПО) МСВБ до обороняемых объектов и сохранить собственные
средства для обеспечения дальнейшего функционирования. В свою
очередь МСВБ стремится максимизировать количество пораженных
объектов МСНБ. На основе указанных целей составлены показатели
эффективности для обеих систем и сформирована задача их кон-
фликтного взаимодействия.
Групповой состав МСВБ: X
1
(
t
0
) — количество тактических ракет
пассивного наведения (ТРПН) в МСВБ, нацеленных на поражение
ПО МСНБ;
X
2
(
t
0
) — количество тактических ракет активного наведе-
ния (ТРАН) в МСВБ, причем ракеты активного наведения могут быть
нацелены на все объекты МСНБ, но с разными вероятностями их по-
ражения;
X
3
(
t
0
) — количество комплексов РЭБ (самолеты-
постановщики помех), причем в конфликтной ситуации их воздей-
ствие влияет на вероятность поражения объектами ТРАН МСВБ и
АО МСНБ;
X
4
(
t
0
) — количество пассивных объектов МСВБ: подраз-
деление штурмовиков (ПШ), авиационная группа сетецентрического
управления (АГСУ), головные части баллистических ракет (ГЧБР),
которые наносят максимальный урон МСНБ;
X
в
(
t
0
) — количество ра-
кет «воздух-воздух» (РВВ), которые предохраняют ТРПН; ТРАН и
ПО от поражения ЗУР МСНБ.


