В.Н. Коновалов, М.О. Корлякова
10
Моделирование линейных и слабо нелинейных объектов и под-
систем гетерогенными однослойными сетями с подбором нейронов
соответствующего аппроксимируемой зависимости типа позволяет
минимизировать размер системы управления и перейти к однород-
ным формам моделирования различных процессов.
Поскольку нейроные сети типа многослойного перцептрона явля-
ются универсальным аппроксиматором [4], можно построить модели
более сложных подсистем летательных аппаратов. Рассмотрим в каче-
стве примера моделирование системы наведения и определения уско-
рения, которое должна развивать противоракета при решении задачи
поражения движущейся мишени. В качестве модели используем один
из демонстрационных примеров
Aerospace ToolBox MatLab
[14].
Модельные данные сформированы для управления противораке-
той относительно подмножеств случайных значений начальной вы-
соты и начальной скорости мишени. Общий объем данных составля-
ет 2 500 примеров, из которых 2 300 использованы для обучения.
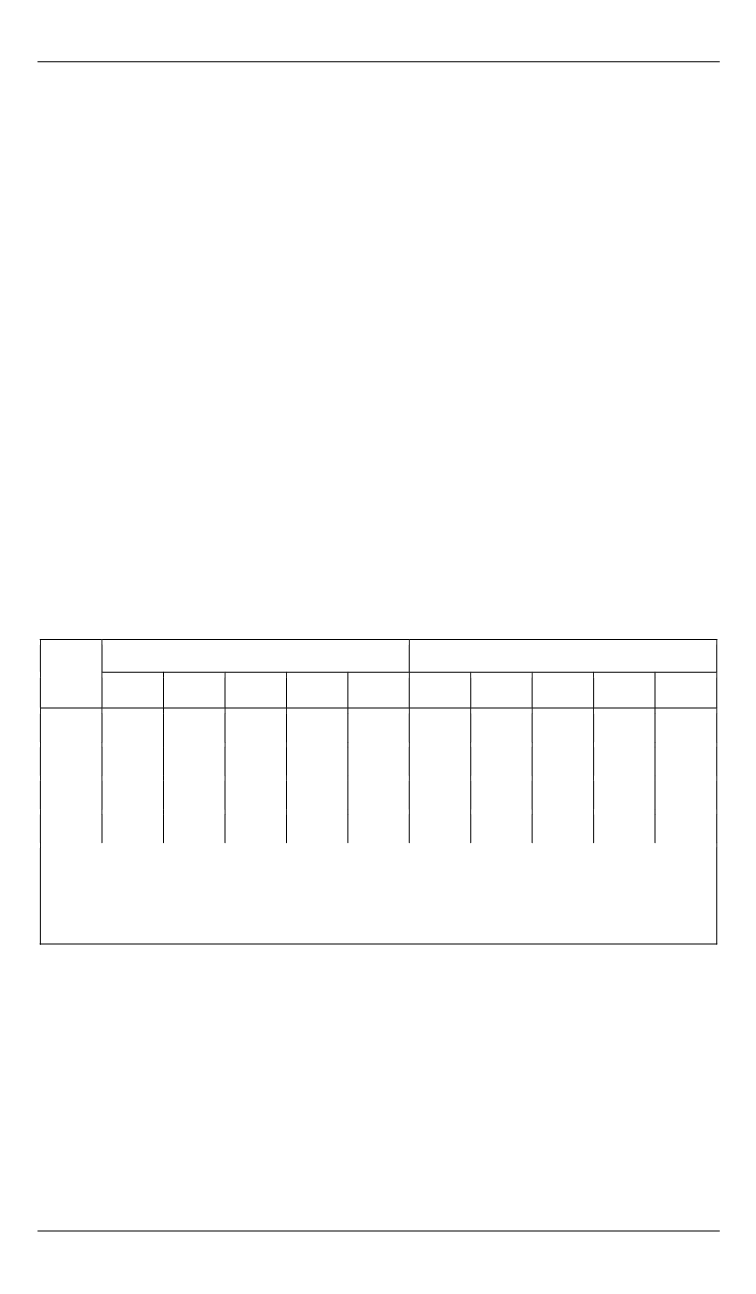
Ошибки обучения и тестирования формируемой нейросетевой моде-
ли приведены в табл. 3.
Таблица 3
Относительные ошибки моделирования параметров управления
противоракетой в нейросетевой системе
n
Обучение
Тестирование
X
1
X
2
X
3
X
4
X
5
X
1
X
2
X
3
X
4
X
5
4
0,070 0,013 0,016 0,084 0,047 0,070 0,013 0,015 0,084 0,046
6
0,056 0,015 0,016 0,065 0,036 0,057 0,016 0,014 0,067 0,036
8
0,044 0,014 0,016 0,064 0,028 0,043 0,014 0,015 0,065 0,028
10 0,038 0,013 0,018 0,062 0,027 0,038 0,014 0,017 0,063 0,027
Примечание. Здесь
X
1
— угловая скорость противоракеты;
X
2
— ускорение
противоракеты;
X
3
— угол между объектом и целью;
X
4
— скорость противораке-
ты;
X
5
— расстояние до цели. Все моделируемые величины приведены к диапазо-
ну [–1, 1].
Поскольку реализация непрерывных моделей входных сигналов
в цифровой элементной базе может быть затруднена, рассмотрим мо-
делирование линейной системы (атмосферы) с дискретной моделью
кодирования входного сигнала. Будем представлять каждый из вхо-
дов 8-разрядным числом со знаком. Тогда входной сигнал будет
представлен шиной из 8 бинарных входов, а выходной — шиной из
32 бинарных выходов.
По итогам моделирования (табл. 4), получена следующая схема
сети: число нейронов
6;
n
диапазон входов
{ 1, 1};
i
X
тип выход-


