














 9 / 13
9 / 13

К вопросу о выборе цифрового фильтра на выходе лазерного гирометра…
9
ряемой угловой скорости за весь период начальной ориентации
прибора.
Оптимизация размаха линий регрессии.
Оптимизация размаха
осуществляется следующим образом.
Выбирается минимальный размах
R
линий регрессии — 90 %
общего количества
K
точек измерения за все время измерения.
Скользящим образом проводятся
М
линий регрессии со сдвигом
(
K
–
М
)/
R
(значения
R
и
М
выбираются такими, чтобы отношение
(
K
–
М
)/
R
было целым числом). Робастно из
М
наклонов линий ре-
грессии вычисляется и запоминается средний наклон линий.
Затем генератор случайных чисел перенастраивается и генериру-
ется новая функция вибраций основания. Путем моделирования по-
лучается новый выходной сигнал гирометра, который обрабатывает-
ся по алгоритму, описанному ранее для выбранных значений
R
и
М
.
После накопления массива данных о средних наклонах вычисляется
СКО в этом массиве относительно точного значения. Полученное
значение СКО ставится в соответствие выбранному значению
R
.
Затем значение
R
увеличивается и вычисляется новое значение
СКО. В результате получается график зависимости СКО от
R
, на ко-
тором видно, что при определенном
R
СКО имеет минимальное зна-
чение.
После проведения процедуры оптимизации исходя из получения
наименьшего значения СКО размах линий регрессии составил
134 180 точек или 93,18 % общего числа (144 001) входных данных
фильтра (для времени измерения 6 мин и частоты следования данных
400 Гц).
Сравнение эффективности работы перечисленных фильтров.
Результаты математического моделирования работы четырех цифро-
вых фильтров, обрабатывающих выходной сигнал ЛГ и находящихся
в условиях вибраций в диапазоне частот 1…400 Гц с СКО угловой
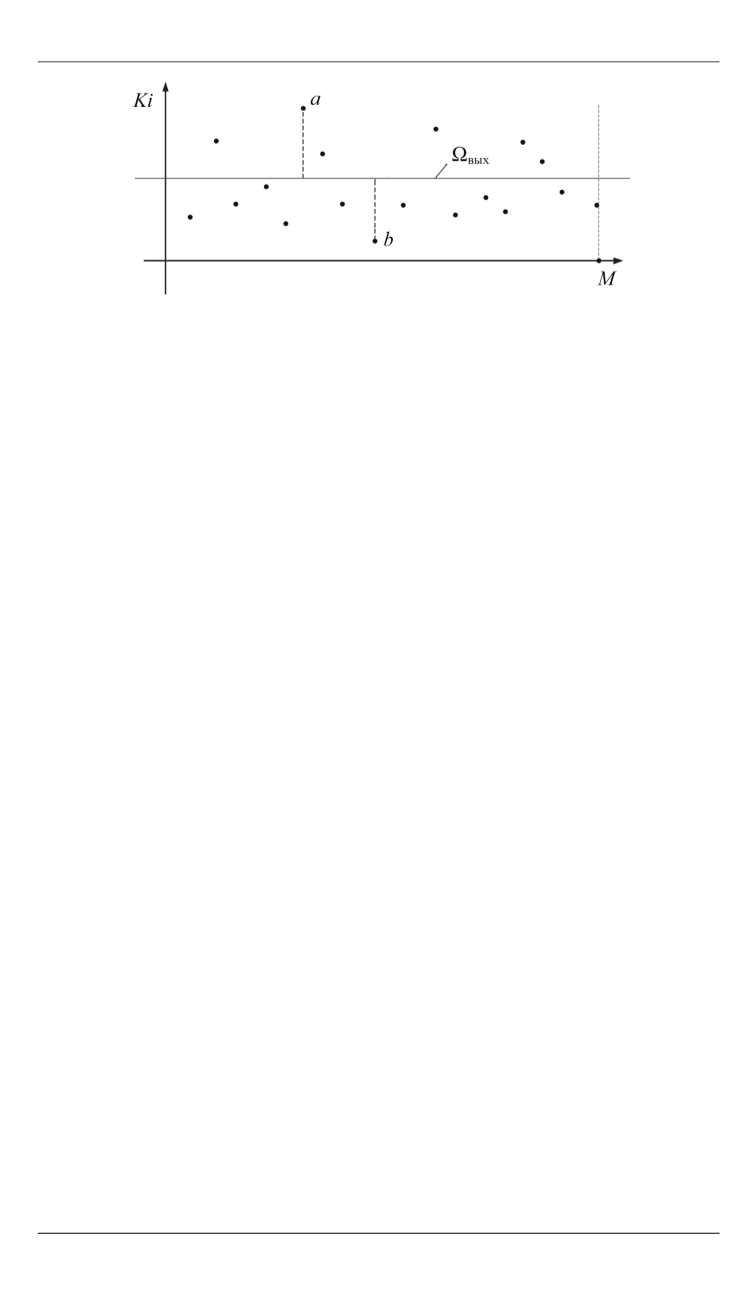
Рис. 4.
Иллюстрация метода робастной селекции (
а
и
b
— максимально
удаленные от средней линии точки)