














 7 / 10
7 / 10

Применение данных электромиографии в системах управления экзоскелетными …
Инженерный журнал: наука и инновации
# 6·2017 7
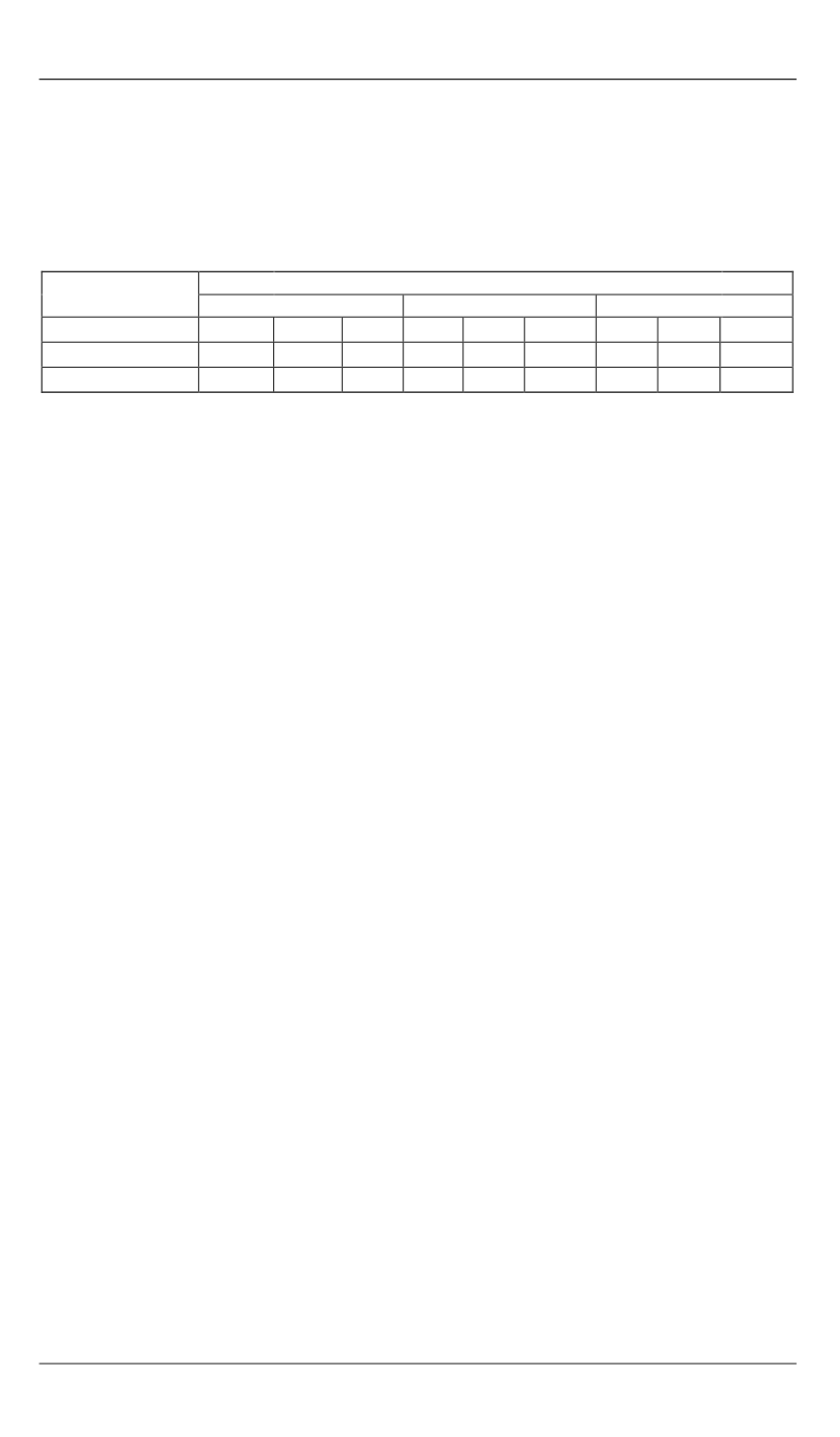
Полученные исходные ЭМГ-сигналы обрабатываются RMS-
фильтром [6, 7]. Значения признаков движения (таблица) передаются
в классификатор для распознавания типа движения лучезапястного
сустава.
Значения признаков движения для трех испытуемых (И1, И2, И3)
Результаты полунатурного моделирования с использованием
лабораторного стенда [6] демонтируют высокую точность распозна-
вания типа движений (более 93 %) и подтверждают возможность
применения предложенных алгоритмов для реализации мехатронной
системы «робот-манипулятор — повторитель движений».
Заключение.
В работе рассмотрены возможности применения дан-
ных ЭМГ в системах управления экзоскелетными устройствами. Пред-
ставлена функциональная модель экзоскелетного устройства, рассмот-
рены методы получения и обработки ЭМГ-сигналов. Приведены кине-
матическая модель робота-манипулятора, имитирующего движения
экзоскелета руки человека. Разработан классификатор на основе нечет-
кой логики, который продемонстрировал высокую точность (вероят-
ность) распознавания типа движений лучезапястного сустава.
Разработанные алгоритмы и программное обеспечение могут
быть использованы для решения кинематических задач, синтеза за-
конов управления движением звеньев робота-манипулятора и визуа-
лизации пространственного движения захвата робота-манипулятора в
режиме реального времени.
Закономерности, полученные в результате моделирования клас-
сификатора типа движений на основе нечеткой логики, могут быть
использованы в дальнейшем при проектировании экзоскелетных си-
стем для верхних конечностей человека.
ЛИТЕРАТУРА
[1]
Андрианов Д.А., Гаврилов А.И. Разработка системы анализа биологиче-
ских показателей человека на основе нейросетевых технологии.
Молодеж-
ный научно-технический вестник
, 2012, № 3.
URL:
http://sntbul.bmstu.ru/doc/458150.html(дата обращения 04.12.2014).
[2]
Зенкевич С.Л., Ющенко А.С.
Основы управления манипуляционными робо-
тами
. 2-е изд. Москва, МГТУ им. Н.Э. Баумана, 2004, 480 с.
[3]
Siti A.A., Asnor J.I., Sawal A. Classification of surface electromyographic sig-
nal using fuzzy logic for prosthesis control application.
IEEE EMBS Conference
on biomedical engineering and science
, 2010, pp. 471–474.
Тип движения
RMS, B
И1
И2
И3
Разгибание
0,99
0,81 0,12 1,00 0,09 0,13 0,90 0,08 0,10
Сгибание
0,06
0,13 0,66 0,04 0,21 0,50 0,10 0,10 0,55
Супинация
0,06
0,34 0,12 0,09 0,48 0,10 0,07 0,58 0,08