1
УДК 551.46.07
Автоматизация движения противоминного
телеуправляемого подводного аппарата
© С.А. Егоров
МГТУ им. Н.Э. Баумана, Москва, 105005, Россия
Рассмотрен подход к построению системы управления движением противоминного
телеуправляемого подводного аппарата, основанный на выделении отдельных режи-
мов работы данной системы и позволяющий автоматизировать схему проведения
противоминных действий.
Ключевые слова:
телеуправляемый подводный аппарат, противоминные действия,
метод наведения, система управления, информационно-измерительный комплекс.
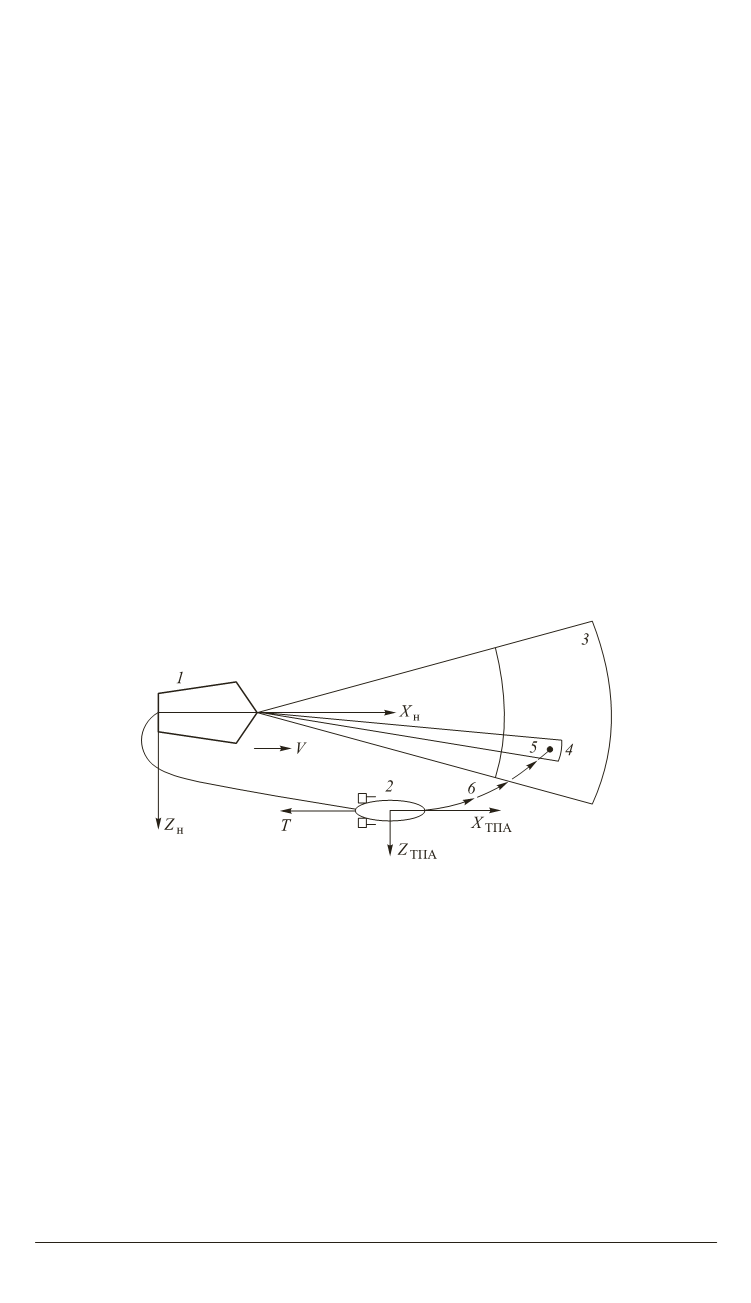
Технология проведения противоминных действий с использованием
телеуправляемого подводного аппарата (ТПА) проиллюстрирована
на рис. 1.
Рис. 1.
Схема выполнения противоминных действий с использованием
ТПА (горизонтальная плоскость)
Базовое судно (тральщик)
1
и ТПА
2
в режиме совместного движе-
ния синхронно перемещаются со скоростью
V
по обследуемой аквато-
рии. Относительно тральщика ТПА находится впереди по курсу судна
в точке с заданными координатами (система координат
X
н
Z
н
). При об-
наружении корабельной гидроакустической станцией миноискания
(ГАСМ) объекта
5
(объект попал в поле зрения сектора
3
тракта обна-
ружения ГАСМ) и его классификации как миноподобного (сектор
4
тракта классификации) ТПА направляется к объекту (траектория
6
)
и с помощью собственных гидроакустических и телевизионных средств
проводит допоиск и идентификацию объекта. Если объект оказался


