10
А.С. Ющенко
и т. п. В этом случае для принятия решения может быть применена
наиболее просто реализуемая схема нечеткого логического вывода Мам-
дани, состоящая из процедур фазификации показаний датчиков, опре-
деляющих относительное положение робота и маяков, и дефазификации
получаемых управляющих команд.
В ряде случаев правила выполнения операций роботом не могут
быть заранее сформулированы человеком. Это касается в первую оче-
редь задач управления, решаемых оператором путем выработки соот-
ветствующего сенсомоторного навыка, ккоторым относятся, например,
задачи дистанционного управления мобильными роботами при наличии
типовых препятствий (эскарп, контрэскарп, лестница, узкий проход
и т. п.). Другими примерами могут являться манипуляционные задачи
сборки типа «вал–втулка» или задачи инструментальной механической
обработки, требующие контроля сил. Возникает проблема передачи
рабочих навыков оператора, минуя лингвистическое представление пра-
вил поведения. Эта проблема может быть решена с помощью искус-
ственной гибридной нейронной сети, основанной на нечетких
отношениях и способной обучаться в процессе управления роботом со
стороны опытного оператора.
Схема управления роботом в таком случае показана на рис. 5,
a
[10].
Ядро этой схемы – адаптивная система нечеткого вывода (АСНВ), реали-
зованная в виде гибридной сети. Принцип работы АСНВ проиллюстри-
рован на схеме, представленной на рис. 5,
б
. Схема имеет два входных
сигнала и один выходной. В ней реализованы два правила продукцион-
ного типа: если
x
есть
A
i
и
y
есть
B
i
, то
f
i
=
p
i
x +
q
i
y +
r
i
,
i
= 1, 2.
Каждый
i
-й узел в первом слое определяется значениями линг-
вистических переменных
А
i
и
В
i
с заданной функцией принадлеж-
ности μ
i
(
x
) (например, далеко, близко, справа и т. п.). Параметры
этих функций могут изменяться в процессе настройки системы (па-
раметры антицедента). Функция узлов во втором слое – перемно-
жение входных сигналов, что соответствует логическому «и» «
х
есть
А
i
и
у
есть
В
j
»
( ) ( ),
1, 2.
i
i
i
A
B
w x y i
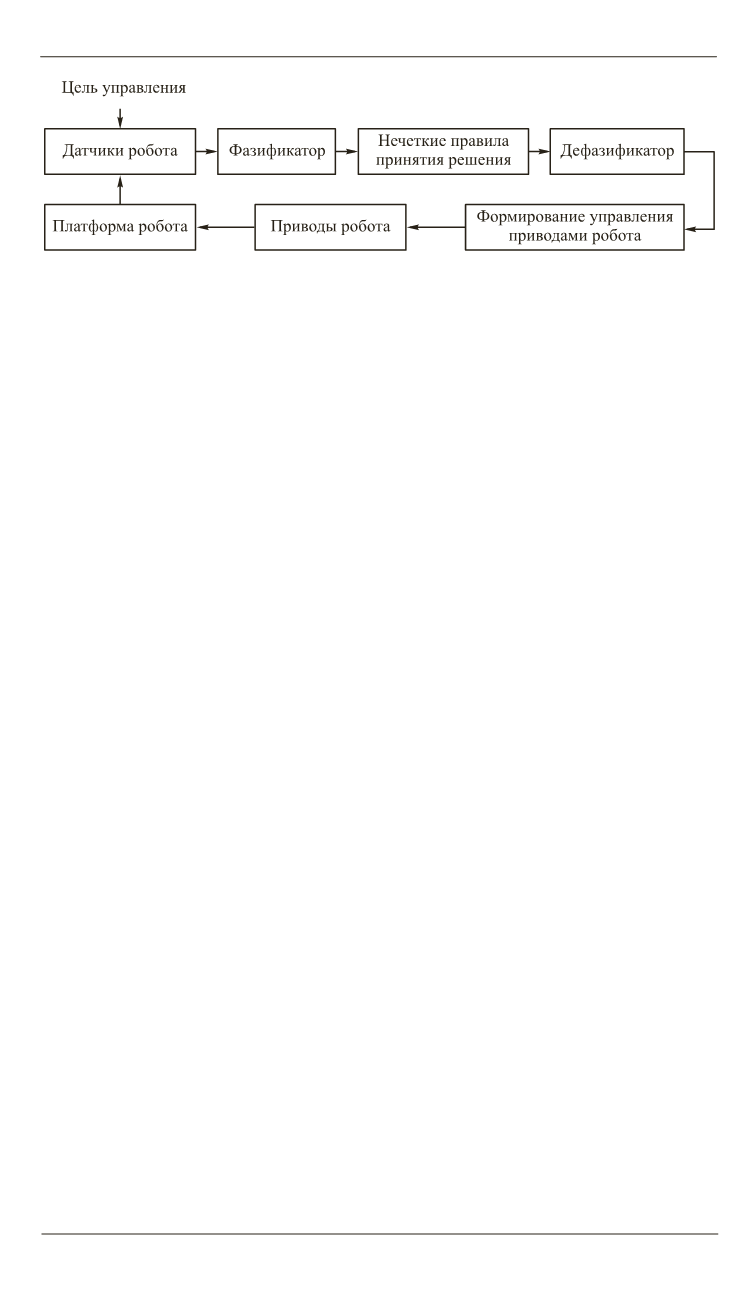
Рис. 4.
Схема управления мобильным роботом с использованием
нечеткого контроллера


