11
Нечеткое управление в эргатических робототехнических системах
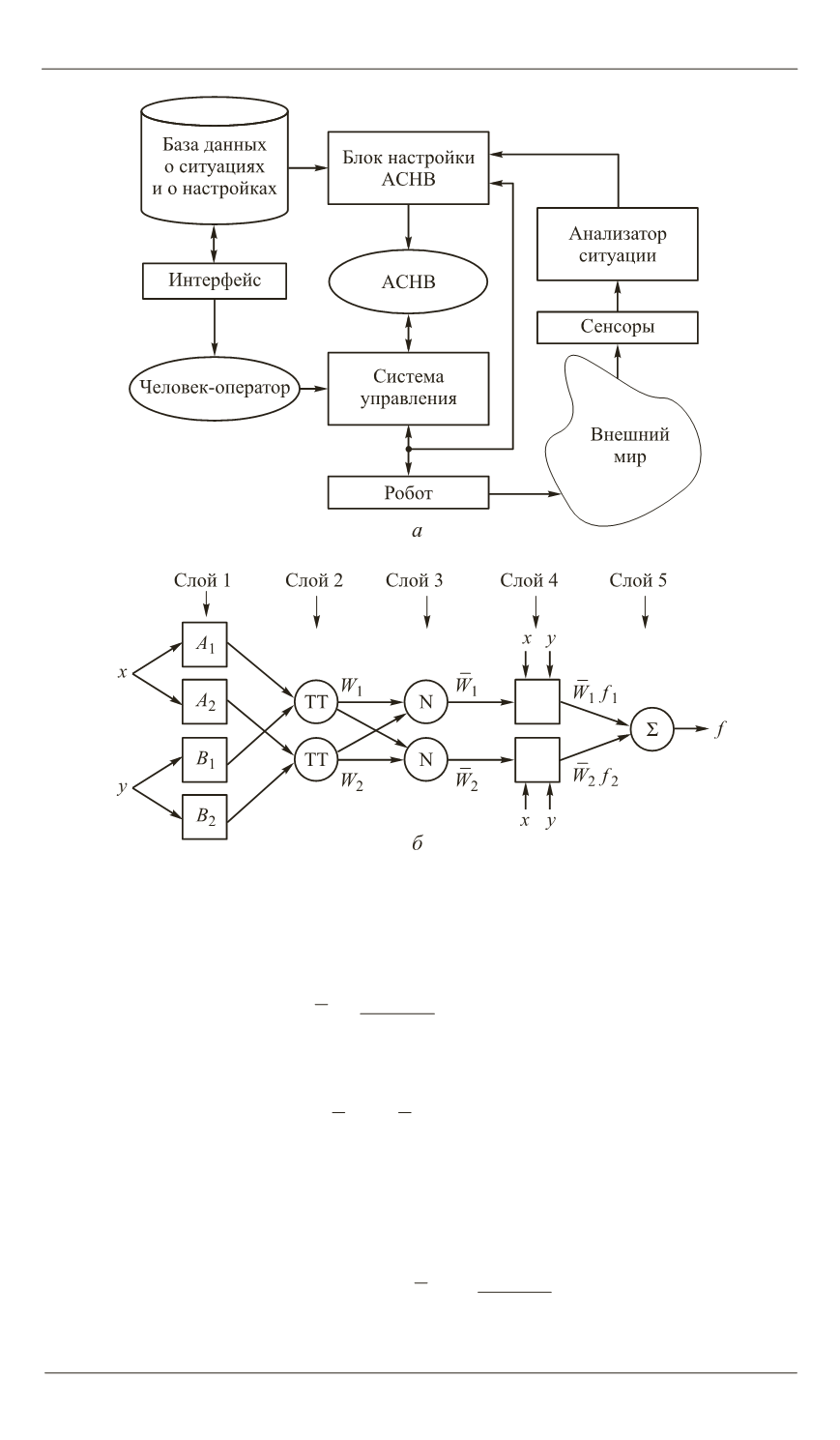
В третьем слое происходит нормализация потока информации
1
2
,
1, 2.
i
i
w w
i
w w
Каждый узел сети в четвертом слое имеет узловую функцию
4
(
),
i
i i
i
i
i
i
Q w f w p x q y r
где {
p
i
,
q
i
,
r
i
} – набор настраиваемых параметров (параметры консек-
вента). В единственном узле последнего, пятого слоя выходная величи-
на вычисляется по формуле
5
1
.
i i
i
i i
i
i
i
w f
f Q w f
w
Рис. 5.
Структурная схема системы управления (
а
) и схема гибридной сети
нечеткого вывода (
б
)


