К.Ю. Машков, В.И. Рубцов, А.П. Федоренков
10
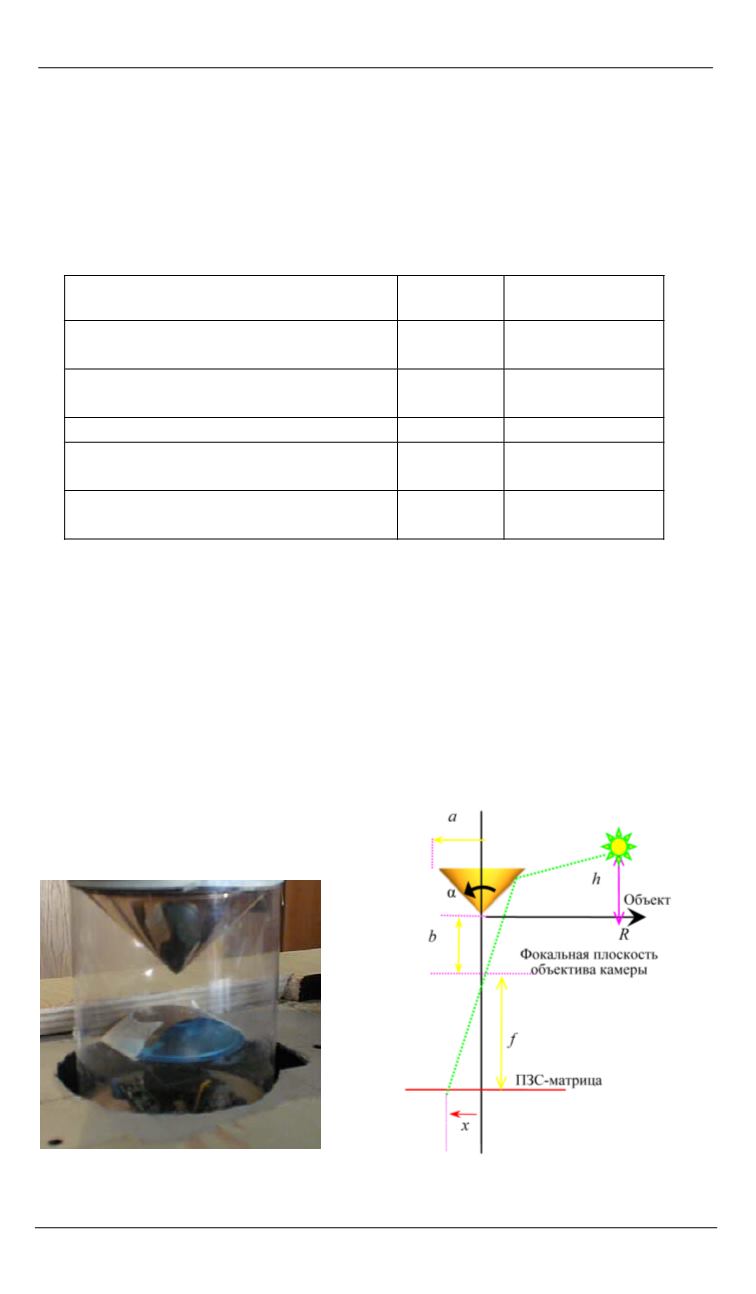
Рис. 4.
Формирование образа объекта
на ПЗС-матрице видеокамеры [11]
ства современных мобильных малых роботов входит несколько телеви-
зионных камер. Рассмотрим малый мобильный робот с телевизионной
камерой и коническим сенсором в составе СТЗ [11]. Конический сенсор
(рис. 3) обеспечивает круговой обзор источников света в окружении ро-
бота; он состоит из корпуса, конического зеркала и видеокамеры.
Таблица 4
Скорость некоторых зарубежных РТК
РТК
Масса, кг Скорость, км/ч
VIPeR (гусеничный движитель +
+ опоры)
12
12
Avantguard UGCV (четырехгусенич-
ный движитель)
1700
20
Talon (двухгусеничный движитель)
42
10
Аппарат SVGV «ПакБот» (iRobot)
(четырехгусеничный движитель)
11…15
10
iRobot Warrior (четырехгусеничный
движитель)
150
19
Исходя из модели конического сенсора, основанной на законах
геометрической оптики, по расстоянию
х
образа отражаемого объек-
та от центра изображения при известном параметре
h
можно опреде-
лить расстояние до объекта (рис. 4).
Направление на объект совпадает с направлением его образа в
осях сцены на ПЗС-матрице (сокр. от «прибор с зарядовой связью»)
видеокамеры сенсора. Зависимость расстояния от объекта
R
(
x
) от по-
ложения
х
его образа на плоскости ПЗС-матрицы видеокамеры для
произвольного угла α при вершине
конического отражателя в этой
модели имеет следующей вид:
Рис. 3.
Действие конического
сенсора [11]


