Чжо Ту Аунг, Д.В. Мельников
10
11
12
1,
1,
V
V
1
1
1
2
0,5,
0,5;
V
V
A
A
21
22
23
24
25
0,90618,
0,53847,
0,
0,53847,
0,90618;
V
V
V V
V
2
2
2
2
2
1
2
3
5
4
0,11846,
0, 23931,
0, 284444,
0, 23931,
0,11846.
V
V
V
V
V
A
A
A
A
A
Воспользовавшись формулой (9), легко найти математическое
ожидание и дисперсию в момент времени
1
t
(реализации функции
1
2
1 2
;
,
k
k
X t V V
можно найти аналитически, а в общем случае числен-
ным методом):
16
1
1,137328 10 ;
X t
m t
1
1,1551456.
X t
D t
При
1
3
q
,
2
8
q
(
24)
N
16
1
1,8735013 10 ,
X t
m t
1
1,19864787.
X t
D t
При
1
4
q
,
2
9
q
(
36
N
)
15
1
1,367 10 ,
X t
m t
1
1,18476801695.
X t
D t
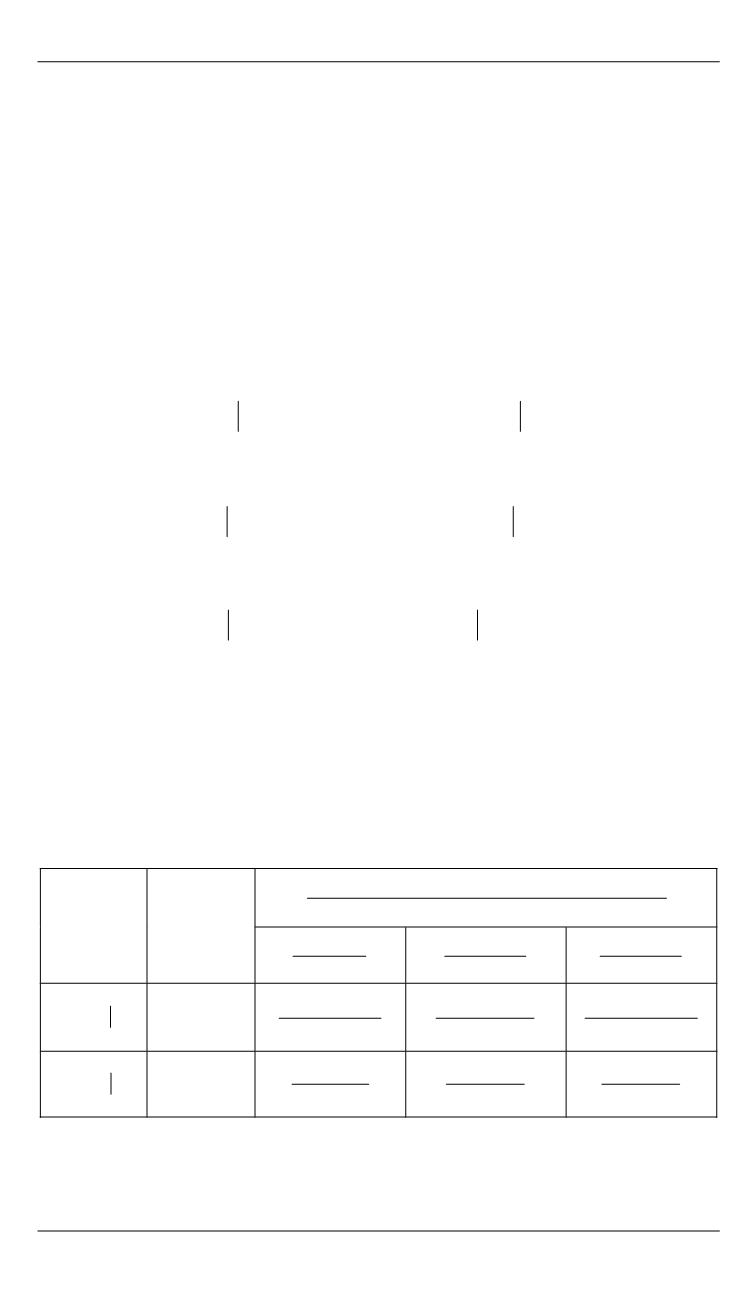
Сравнив полученные приближенные значения с найденными вы-
ше точными, можно установить сходимость метода детерминирован-
ных эквивалентов к точному значению с увеличением числа выборок
случайных величин. Результаты анализа методами детерминирован-
ных эквивалентов и статистических испытаний сведены в таблицу.
Результаты анализа методами детерминированных эквивалентов
и статистических испытаний
Параметр
Точное
решение
Метод детерминированных эквивалентов
Метод статистических испытаний
10
5000
N
N
24
10000
N
N
36
15000
N
N
1
X t
m t
0
16
1,137 10
0,001106
16
1,873 10
0,00867
15
1,367 10
0,00955
1
X t
D t
1,187988
1,155146
1,284333
1,198647
1,292682
1,184768
1,268207
Необходимо отметить, что реализации случайных функций
1
1
, ...,
l
i
k
lk
X V V
можно вычислить проекционно-матричным мето-


