В.Н. Наумов, А.С. Меньшиков, А.С. Кудрявцев, А.А. Долгополов, Ю.Ю. Мерзликин
4
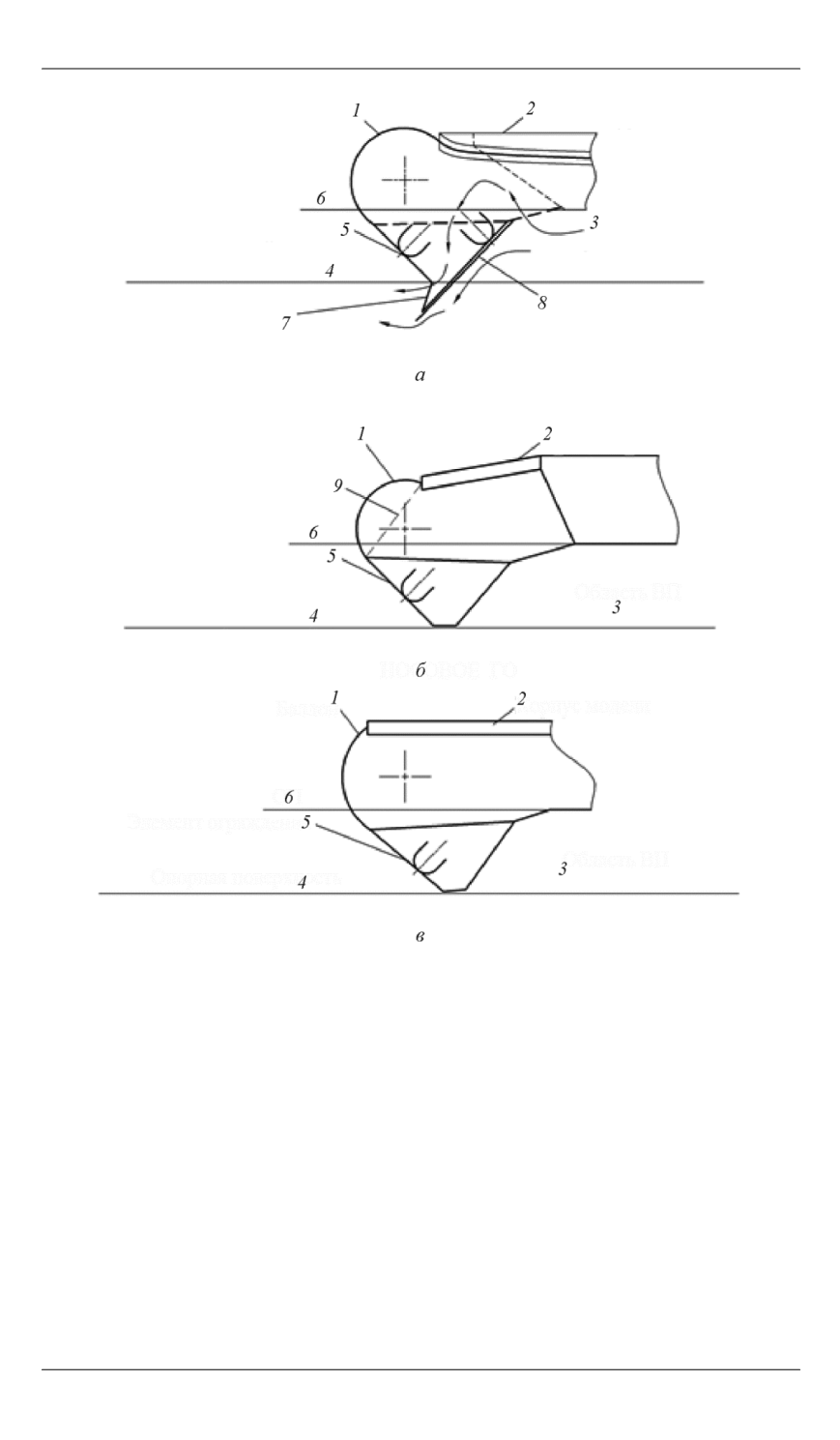
Рис. 3.
Схемы кормового (
а
), бортового (
б
) и носового (
в
)
гибкого ограждения ВП:
1
— баллон;
2
— корпус модели;
3
— область ВП;
4
— опорная поверхность;
5
— элемент ограждения;
6
— основная плоскость;
7
— ласта элемента;
8
—
фартук;
9
— эластичная растяжка
Остойчивость на водной поверхности ТСВП по тангажу (диффе-
ренту)
и крену
оценивается производными продольного и попе-
речного моментов
z
M
и
:
x
M
н
( ) = – 5630
z
дM / д
Н
м/град и
н
( = –1100
x
дM / д
Н
м/град. На твердой поверхности остойчивость
по тангажу (дифференту) и крену оценивается производными
н
= – 8848
z
/
дM д
Н
м/град и
н
= –1810
x
дM / д
Н
м/град.


