














 6 / 15
6 / 15

Т. Синюань, В.П. Подчезерцев
6
Инженерный журнал: наука и инновации
# 10·2017
0
ω ,
+ + =
ij
n ij
K
J
n
ω
ω
(5)
где
;
=
x
xy
yx
y
K K
K
K K
;
=
xij
ij
yij
J
J
J
0
0
0
;
ω
=
ω
x
y
ω
к
к
ω
;
ω −ω
=
ω ω
g
n
g
1
= =
=
xij
ij
ij
yij
ij
n
с
n
d
g
n a
— вектор перегрузок;
g
— ускорение сво-
бодного падения;
г
З
в
ω
= =
ω
ij
ij
ij
ij
ij
a c
b d
ω ω
— вектор угловой скоро-
сти корпуса гироскопа, определяемой горизонтальной ω
г
и верти-
кальной ω
в
составляющей угловой скорости Земли.
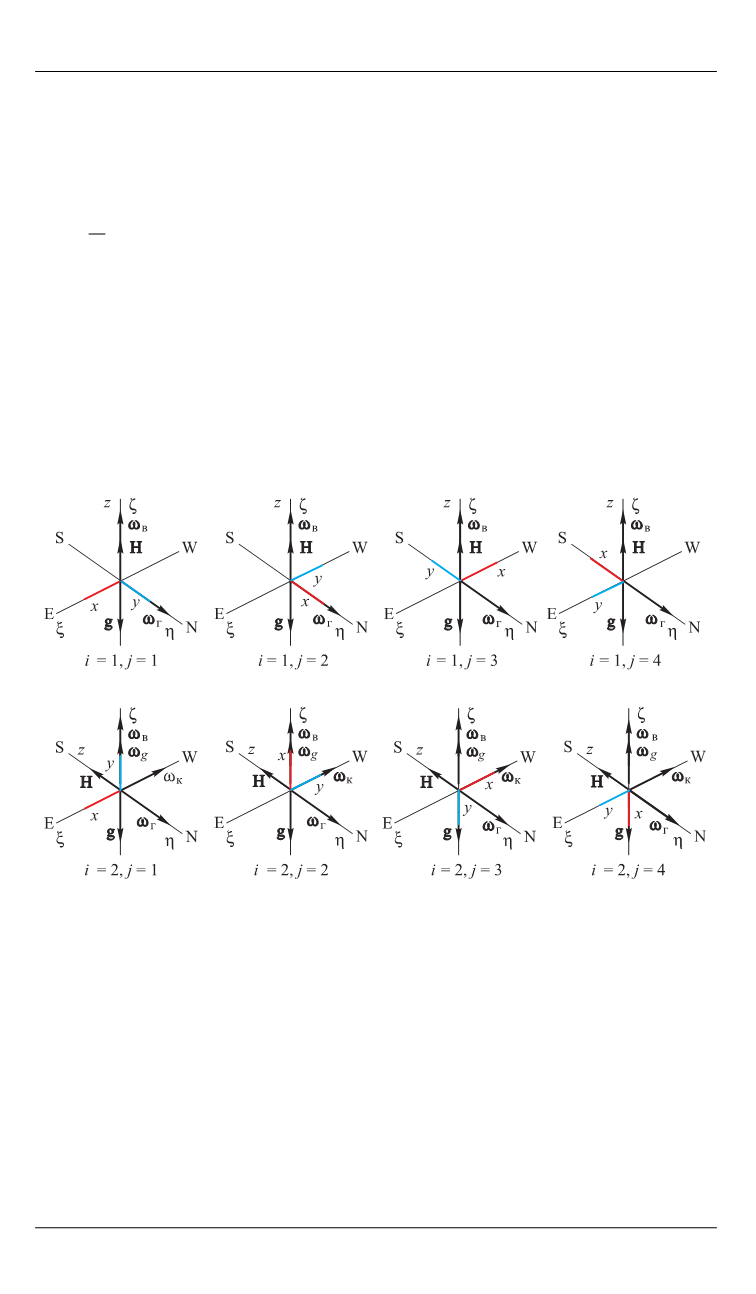
Алгоритм калибровки.
На рис. 3 показаны положения гироско-
па относительно географической СК, в которые он устанавливается
при калибровке.
Рис. 3.
Положения гироскопа относительно географической СК при калибровке
В исходном положении (
i
= 1,
j
= 1) СК корпуса прибора
xyz
, свя-
занная с платформой, совпадает с географической ξηζ, т. е. θ
i
= 1
= 0 и
φ
j
= 1
= 0. Далее платформа последовательно разворачивается вокруг
своей оси ζ
ij
, совпадающей с кинетическим моментом гироскопа
Н
,
через 90
о
на углы φ
j
= 2
= 90
о
, φ
j
= 3
= 180
о
и φ
j
= 4
= 270
о
и арретируется в
каждом задаваемом положении. После чего осуществляется измере-
ние токов
J
x
1
j
и
J
y
1
j
.
Затем платформа поворачивается вокруг оси вращения рамки ξ на
90
о
и фиксируется в положении с индексами
i
= 2,
j
= 1, т. е. θ
i
= 2
= 90
о