В.Я. Колючкин, К.М. Нгуен, Т.Х. Чан
10
Для сравнительной оценки эффективности «Оптимального ал-
горитма» и алгоритма «Центра масс» были проведены эксперимен-
тальные исследования по измерению поперечных перемещений
объекта на макете прибора, схема которого представлена на рис. 5.
В макете прибора использовался He-Ne-лазер, освещавший транспа-
рант в виде периодических штрихов размером 1 мм с периодом
0,1 мм. Транспарант проецировался афокальной репродукционной
ОС с увеличением 5 3
×
в плоскость, где расположены чувствитель-
ные элементы приемника излучения телевизионной цифровой каме-
ры. В камере, которая жестко связана с объектом, используется мат-
ричный приемник излучения, содержащий
1280 720
×
пикселов раз-
мером 3, 75 3, 75
×
мкм
2
. Изображения транспаранта, регистрируемые
цифровой камерой при ее поперечных перемещениях, передавались в
ПЭВМ для обработки с целью оценки координат по алгоритму «Цен-
тра масс» и «Оптимальному алгоритму». Поперечное перемещение
осуществлялось микрометрическим винтом с погрешностью переме-
щения 2 мкм.
В процессе проведения экспериментов объект и связанная с ним
камера располагались вдоль оптической оси прибора в диапазоне
100…1000 мм. В каждом из этих положений задавались поперечные
перемещения в диапазоне от нуля до 0,6 мм и регистрировалось 60
изображений транспаранта при каждом поперечном перемещении.
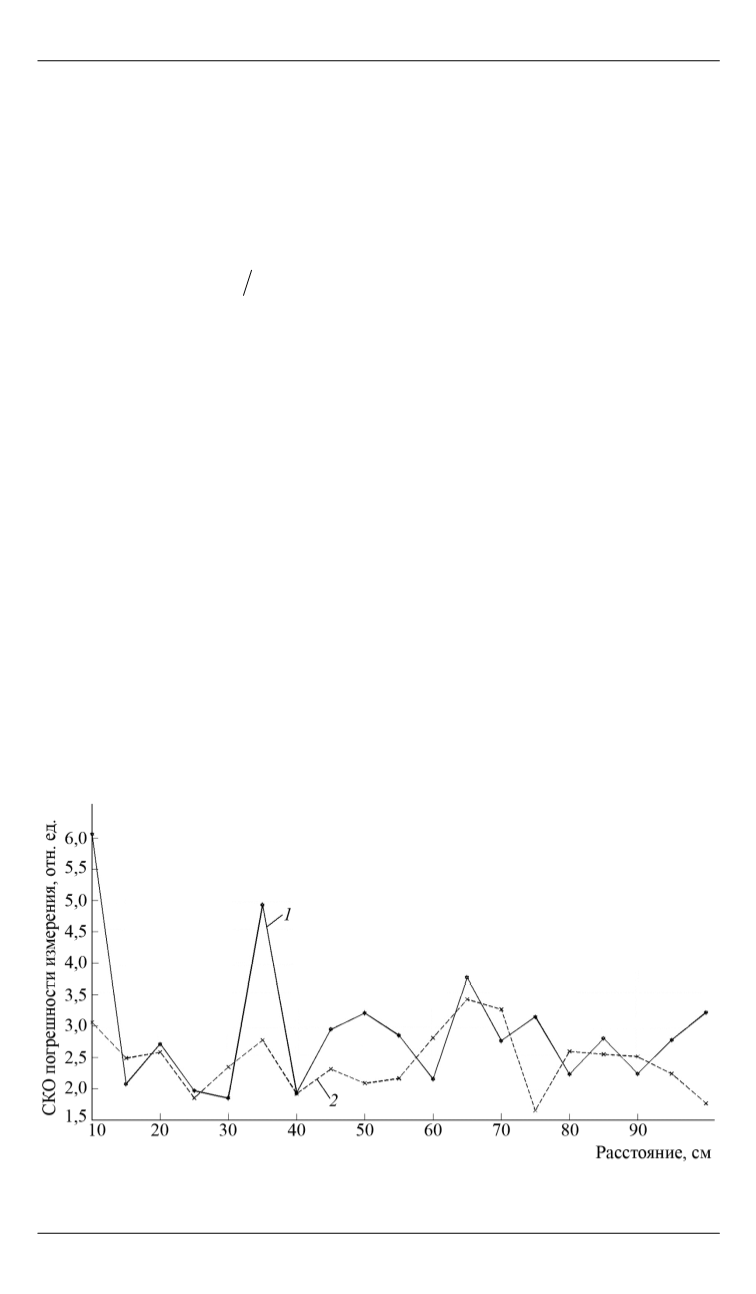
Результаты измерений, обработанные по обоим указанным алгорит-
мам, представлены на рис. 6. По оси ординат отложено значение
СКО погрешности измерения, а по оси абсцисс — положение объекта
вдоль оси прибора.
Рис. 6.
СКО погрешности измерения


