Алгоритмы обработки информации в системах технического зрения промышленных…
7
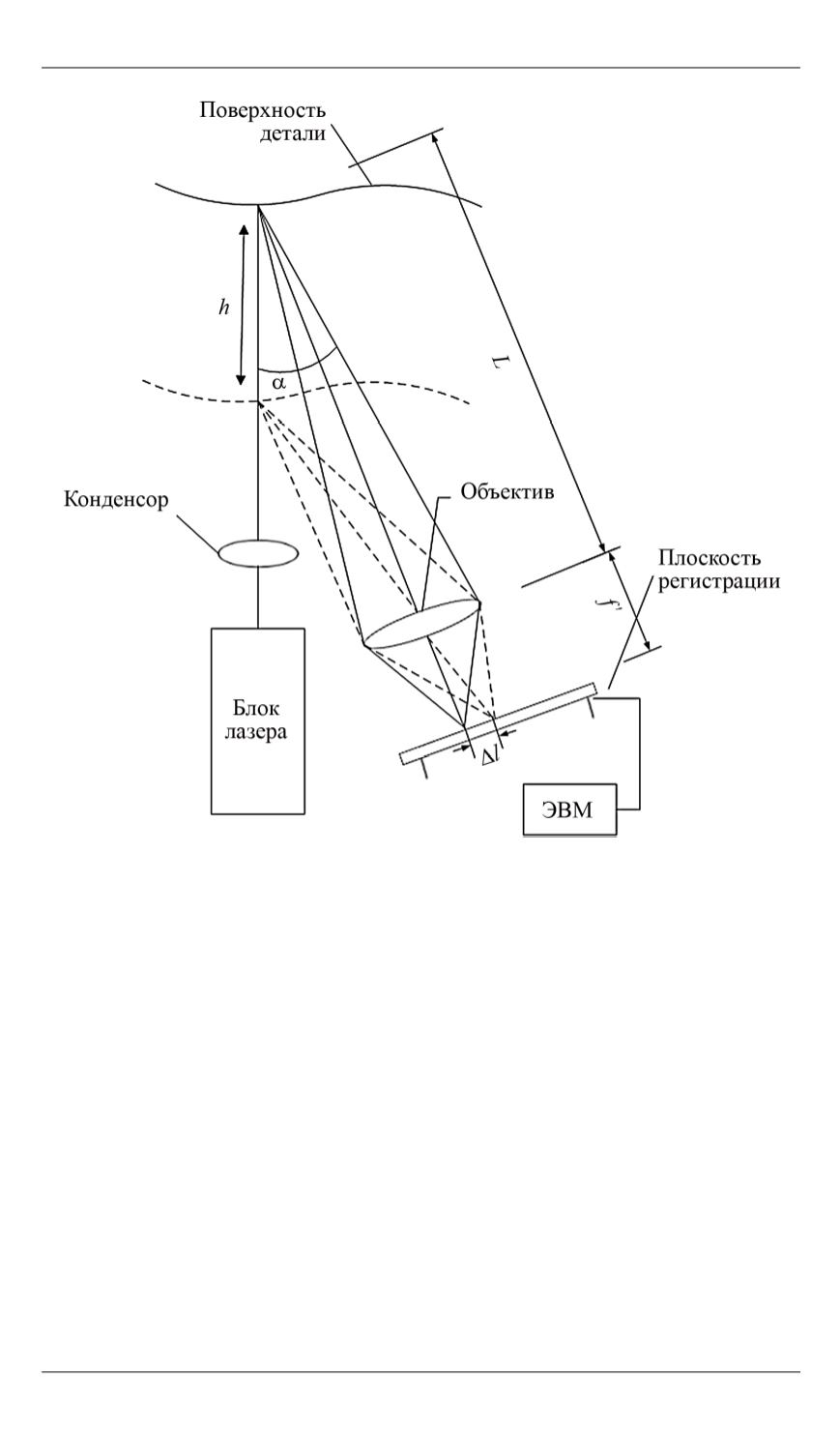
Рис. 4.
Функциональная схема триангуляционного датчика
Из формулы (3) следует, что при увеличении угла
α
чувствитель-
ность датчика возрастает, но при этом уменьшается диапазон измеря-
емых перемещений. Пороговая чувствительность триангуляционного
датчика зависит от размеров чувствительных элементов ПЗС-
приемника, размеров регистрируемого изображения, а также алго-
ритма, применяемого для оценки координат изображения световой
метки.
На рис. 5 представлена функциональная схема прибора, который
может быть использован для контроля поперечных перемещений
объекта, например режущего инструмента, относительно оси враще-
ния детали при обработке на токарном станке [5].
В состав передающей части прибора входят полупроводниковый
лазер
1
с блоком питания и драйвером, объектив
2
, транспарант
3
и
афокальная репродукционная оптическая система (ОС)
4
. Приемная
часть включает в себя интерференционный фильтр
5
, телевизионную


