В.А. Горелов, М.М. Жилейкин, В.А. Шинкаренко
10
0
0,2
0,4
0,6
0,8
1
1,2
0
2
3
4
5
6
0
0,2
0,4
0,6
0,8
1
1,2
0
0,05
0,1
0,15
0,2
0,25
0,3
0
0,2
0,4
0,6
0,8
1
1,2
0
0,3
0,4
0,6
0,7
0,9
1
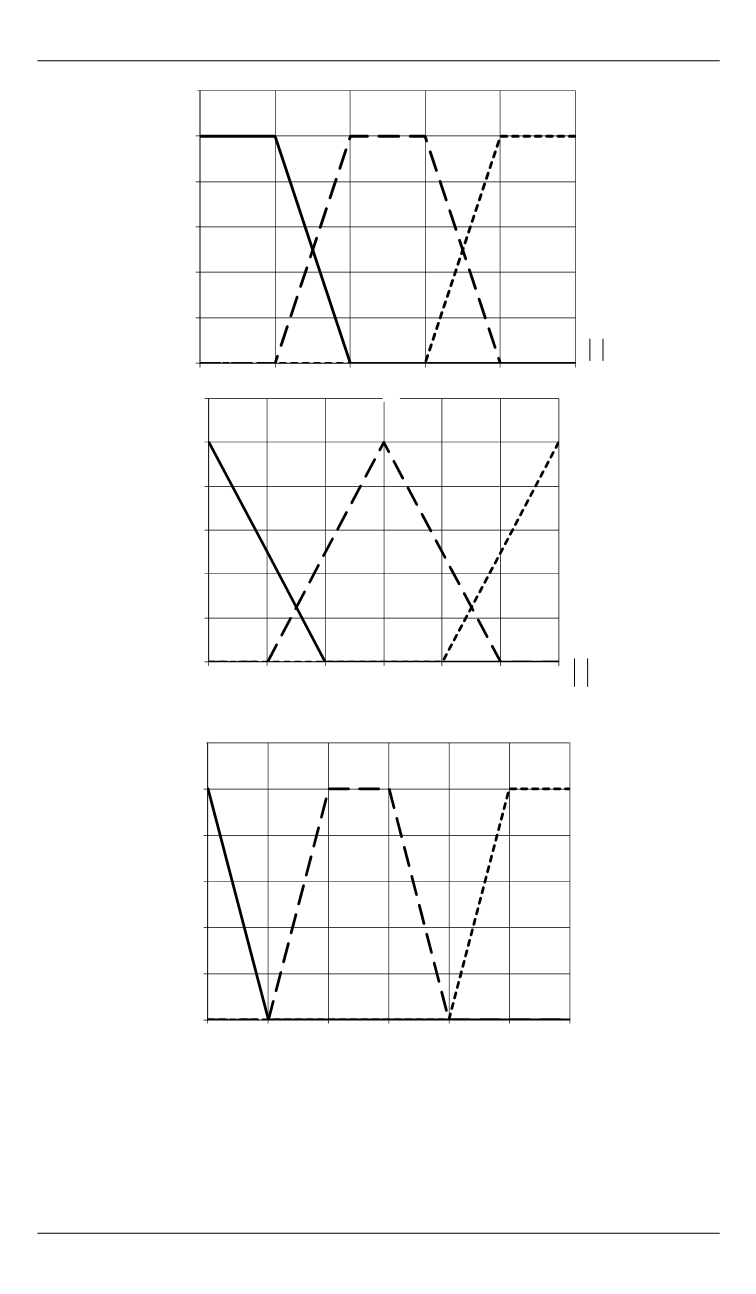
Рис. 2.
Функции принадлежности входных переменных
1
X
(
а
) и
2
X
(
б
),
а также выходной переменной
Y
(
в
):
____
— «низкий уровень»;
__ __
— «средний уровень»;
_ _ _ _
—
«высокий уровень»
μ
, град/c
β
&
0
б
μ
g
h
в
μ
, град
β
а


