














 3 / 14
3 / 14

Аппаратно-программный комплекс для решения задач…
3
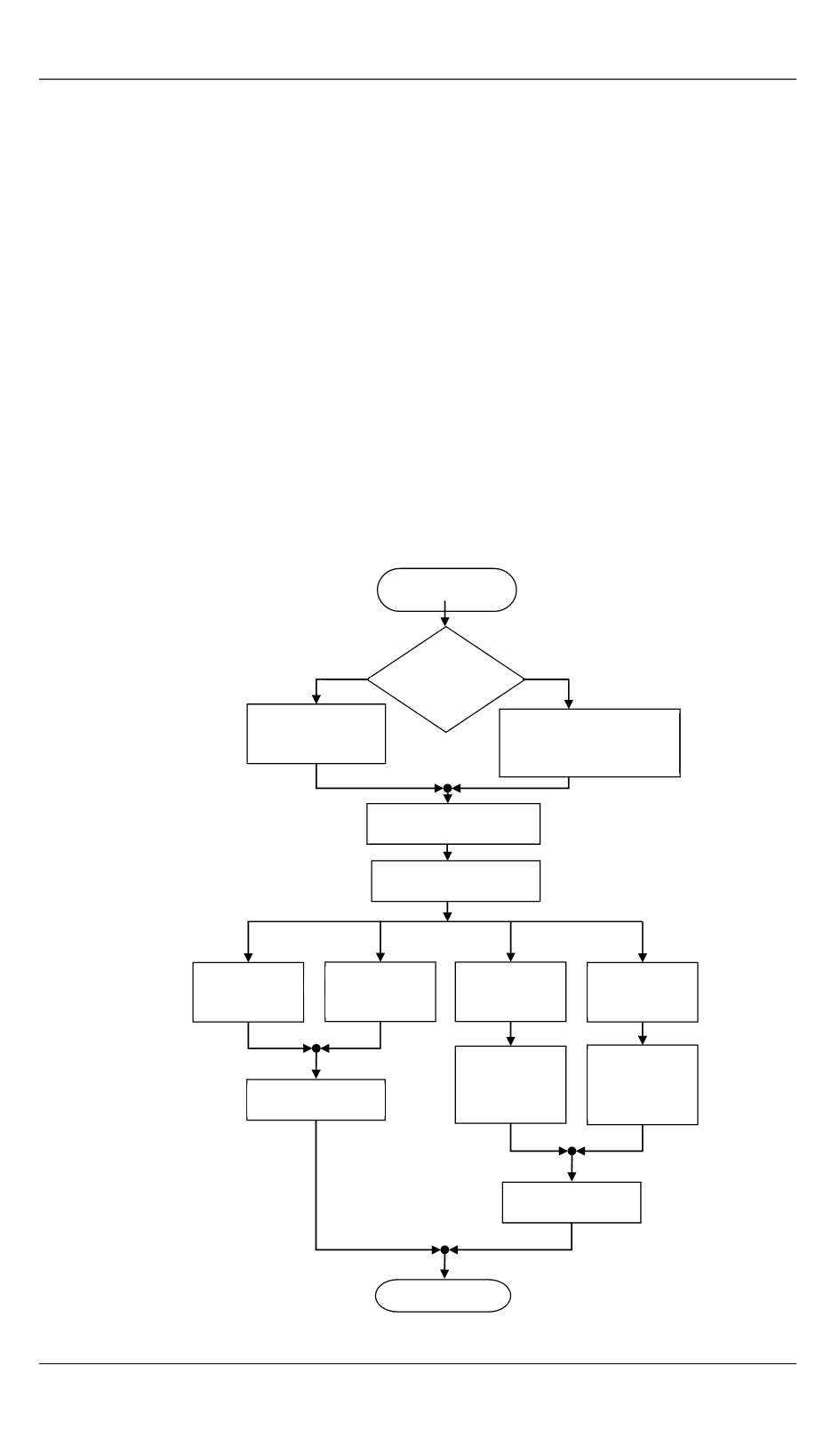
Рис. 2.
Блок-схема алгоритма обучения
CAD-
модель
Загрузка из файла
Сканирование объекта.
Формирование
геометрической модели
Сохранение м
Ввод физических
параметров объекта
одели
объекта в БД
Обучение СТЗ.
Алгоритм 1
Обучение СТЗ.
Алгоритм N
Сохранение
результатов
в БД
…
Планирование
захвата.
ЗУМ N
Сохранение
результатов в БД
…
Планирование
захвата.
ЗУМ 1
Начало
Конец
Сортировка
по качеству
захвата, отсев
Сортировка
по качеству
захвата, отсев
да
нет
(БД), с размещенными в ней моделями используемых захватных
устройств. В БД при работе комплекса вводится (и устраняется при
необходимости) информация об объектах манипулирования.
ПО комплекса, построенное на основе метаоперационной систе-
мы ROS (Robot Operating System) [6], является развитием программ-
ного комплекса, описание которого приведено в работе [7]. ROS
обеспечивает взаимодействие и координацию всех программных мо-
дулей системы и предоставляет ряд готовых модулей для выполнения
стандартных задач.
Комплекс функционирует в двух режимах: обучения и манипу-
лирования (рабочий режим).
Режим обучения.
Формирование и сохранение в БД всей инфор-
мации о новом объекте, необходимой для дальнейшей работы с ним,
происходит в режиме обучения. Для каждого типа объектов обучение
системы достаточно выполнить только один раз. Алгоритм работы
системы в режиме обучения (рис. 2) включает в себя несколько про-