















 4 / 11
4 / 11

В.А. Польский, Ю.И. Рассадкин, А.В. Синицын
4
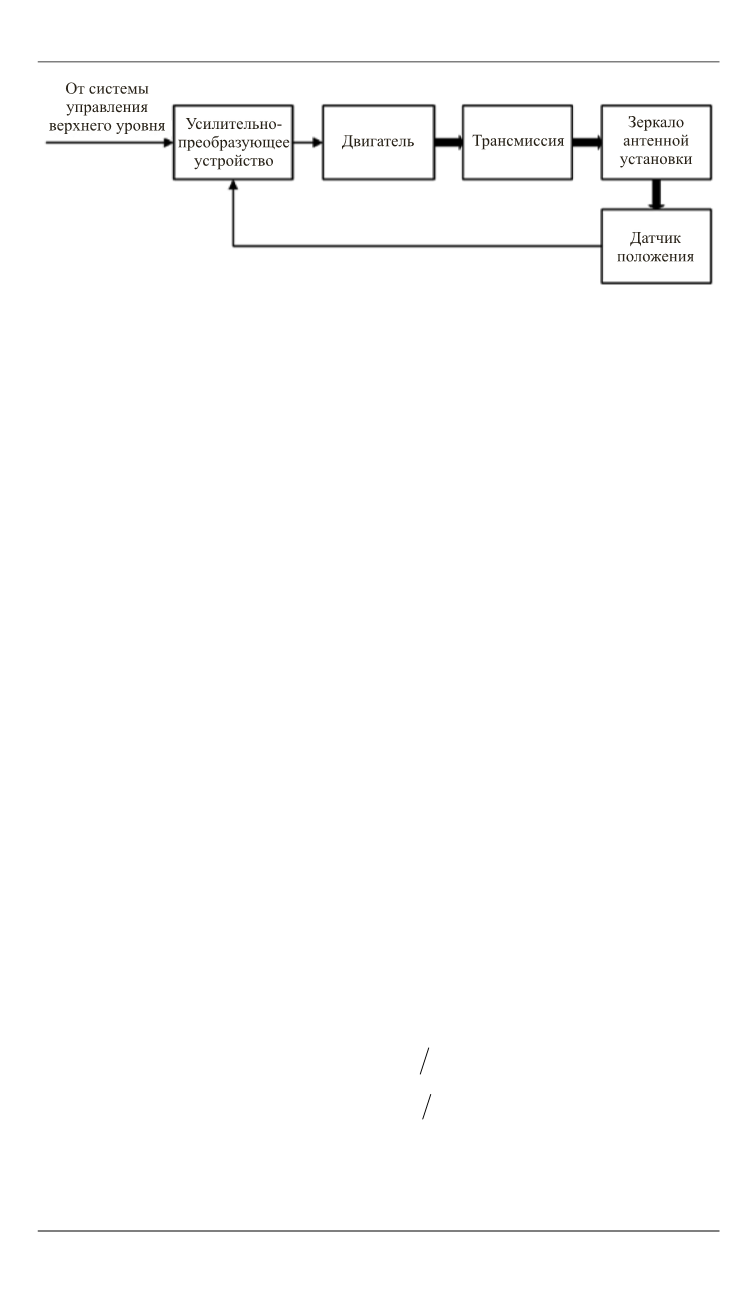
Рис. 3.
Функциональная схема системы управления мехатронным модулем
Модернизация механических передач
.
Основной задачей в хо-
де модернизации являлось соответствие новым техническим требо-
ваниям и устранение многоступенчатой трансмиссии. В модернизи-
рованной системе (см. таблицу) максимальные скорости быстрого
движения по обеим осям всего лишь в 2 раза больше максимальных
скоростей медленного движения В старой системе это соотношение
составляло 88, поэтому и использовался двухдвигательный электро-
привод.
Для новой системы использование двухдвигательного привода
было признано нецелесообразным. Предлагается перейти на однодви-
гательный привод, который должен иметь диапазон регулирования
скорости порядка 7 200. Современные электродвигатели способны
обеспечивать диапазон регулирования скорости до 50 000 и, следова-
тельно, могут быть использованы для создания однодвигательного
привода. Также преимущество перехода на однодвигательный привод
заключается в возможности замены старых многоступенчатых диффе-
ренциальных редукторов новыми одноступенчатыми, в результате че-
го существенно уменьшается люфт и увеличивается жесткость меха-
нической передачи. Кроме того, массогабаритные показатели
механических передач существенно уменьшаются, а точность переда-
чи движения возрастает.
Для перехода к однодвигательному приводу необходимо оценить
передаточные отношения для каждой степени подвижности при за-
мене первичных дифференциальных редукторов новыми односту-
пенчатыми. Общие передаточные отношения можно оценить по сле-
дующим формулам:
у
дв.у.ном у max
;
i
(1)
а
дв.а.ном а max
,
i
(2)
где
i
у
,
i
а
— общие передаточные отношения для угломестной и ази-
мутальной степеней подвижности; Ω
дв.у.ном
, Ω
дв.а.ном
— номинальные