














 6 / 16
6 / 16

Е.А. Лазутин, И.В. Чубарев
6
Инженерный журнал: наука и инновации
# 12·2017
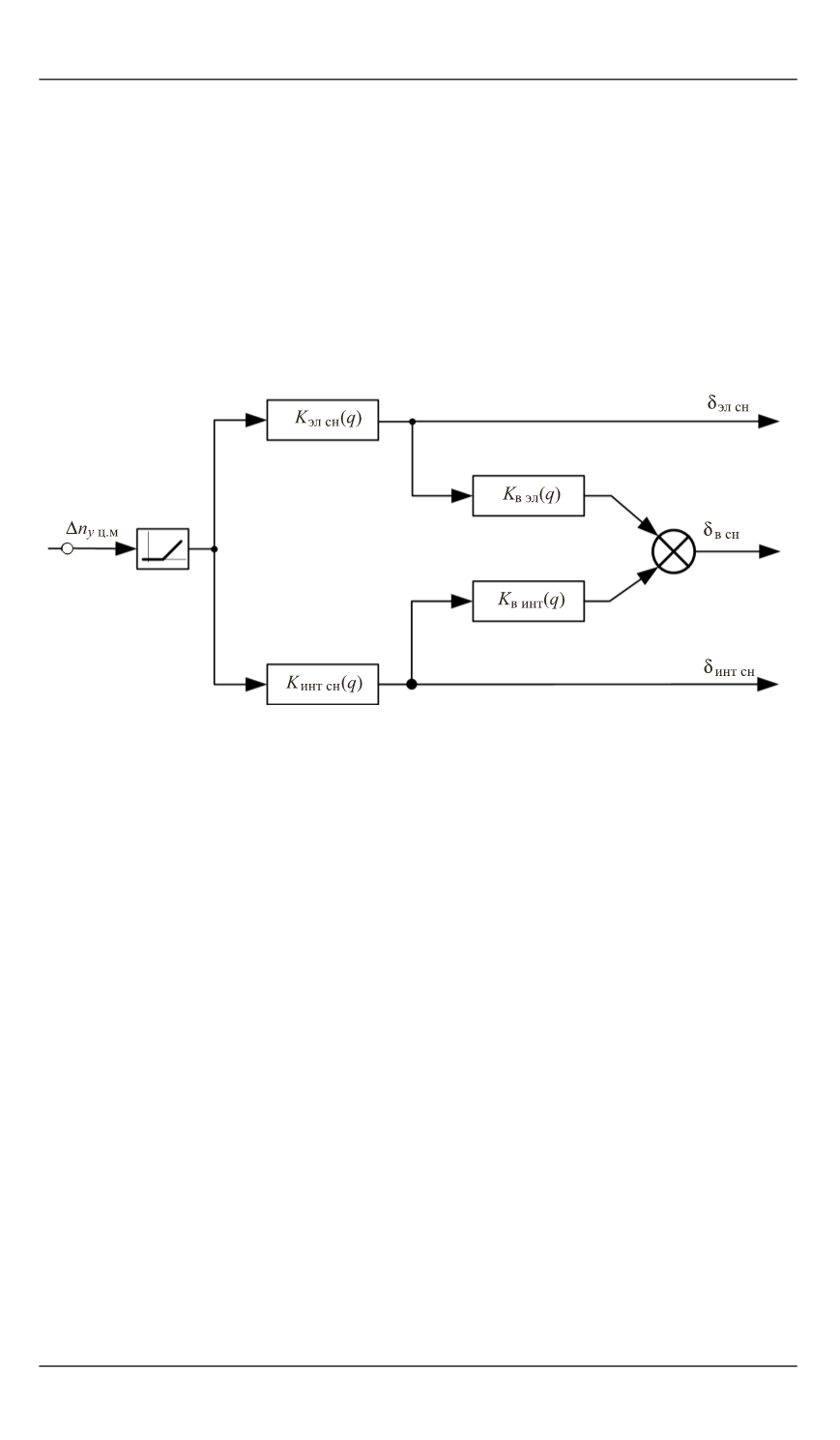
такую структуру, которая использует сигнал датчика нормальной пе-
регрузки, расположенного в центре масс самолета (рис. 1). Сигнал
сначала проходит через зону нечувствительности шириной ∆
n
y
з.н
, что
необходимо для исключения влияния системы на аэродинамическое
качество самолета на крейсерских режимах полета и на характери-
стики устойчивости и управляемости при управлении в диапазоне
перегрузок ∆
n
y
≈ ± 0,2, в пределах которых решаются задачи точного
пилотирования (к примеру, задача выдерживания глиссады при захо-
де на посадку).
Рис. 1
. Структурная схема системы снижения маневренных нагрузок, работающей
по
фактической
перегрузке и использующей в качестве управляющих органов
элероны + интерцепторы:
∆
n
у
ц.м
— приращение нормальной перегрузки относительно единицы в центре масс самоле-
та; δ
эл сн
— управляющий сигнал на элероны от системы снижения нагрузок; δ
инт сн
— управ-
ляющий сигнал на интерцепторы от системы снижения нагрузок; δ
в сн
— сигнал компенса-
ции на руль высоты от элеронов и интерцепторов;
K
эл сн
(
q
),
K
инт сн
(
q
),
K
в эл
(
q
),
K
в инт
(
q
) —
передаточные числа в канале элеронов, интерцепторов и руля высоты, зависящие от ско-
ростного напора
q
Также при прочих равных условиях, изменяя ширину зоны не-
чувствительности, можно влиять на потребную скорость отклонения
управляющих органов системы снижения маневренных нагрузок.
Обычно коэффициенты
K
эл сн
,
K
инт сн
выбирают таким образом,
чтобы при
э
max
y
y
n n
элероны и интерцепторы отклонялись на пол-
ный ход, предусмотренный для работы системы снижения нагрузок.
Для ослабления влияния работы этой системы на статические и
динамические характеристики самолета в ней предусмотрен коррек-
тирующий сигнал на руль высоты, коэффициенты усиления которого
K
в эл
и
K
в инт
необходимо выбирать из условия компенсации измене-
ния момента тангажа при отклонении элеронов и интерцепторов. Ес-
ли для работы системы снижения нагрузок при маневре используют
элероны и интерцепторы с отклонениями 20º…30º, то суммарный